Helikopteri juhtimise põhimõte. Kuidas helikopter töötab? Üldised nõuded hõlmavad
Tänapäeval on inimesed leiutanud palju erinevaid tehnoloogiaid, mis ei suuda mitte ainult mööda teid liikuda, vaid ka lennata. Lennukid, helikopterid ja muud lennukid võimaldasid uurida õhuruumi. Helikopterimootorid, mida oli vaja vastavate masinate normaalseks tööks, on ülivõimsad.
Seadme üldine kirjeldus
Praegu on selliseid üksusi kahte tüüpi. Esimest tüüpi on kolbmootorid või teist tüüpi õhku hingavad mootorid. Lisaks võib rakettmootor toimida ka helikopteri mootorina. Tavaliselt ei kasutata seda aga põhilisena, vaid lülitatakse korraks masina töösse, kui on vaja lisavõimsust näiteks maandumisel või õhkutõusmisel.
Varem kasutati neid sageli helikopteritele paigaldamiseks. Neil oli ühevõlliline disain, kuid neid hakati üsna tugevalt asendama muud tüüpi seadmetega. See muutus eriti märgatavaks mitme mootoriga helikopteritel. Seda tüüpi tehnoloogias kasutatakse enim kahevõllilisi turbopropellerkopterimootoreid, millel on nn vaba turbiini.
Kahevõllilised seadmed
Selliste seadmete eripäraks oli see, et turboülelaaduril puudus otsene mehaaniline ühendus pearootoriga. Kahevõlliliste turbopropellerüksuste kasutamist peeti üsna tõhusaks, kuna need võimaldasid helikopteri jõustruktuuri täielikult ära kasutada. Asi on selles, et antud juhul ei sõltunud seadmete pearootori pöörlemiskiirus turbolaaduri pöörlemiskiirusest, see omakorda võimaldas valida iga lennurežiimi jaoks eraldi optimaalse sageduse. Teisisõnu tagas kahevõlliline turbopropellerkopteri mootor elektrijaama tõhusa ja usaldusväärse töö.

Reaktiivpropelleri ajam
Helikopterid kasutavad ka reaktiivpropellerajamit. Sel juhul rakendatakse ringjõudu otse sõukruvi labadele endile, kasutamata rasket ja keerukat mehaanilist jõuülekannet, mis sunniks kogu sõukruvi pöörlema. Sellise ümbermõõdujõu tekitamiseks kasutatakse kas autonoomseid reaktiivmootoreid, mis asuvad rootori labadel, või kasutatakse gaasi (suruõhu) väljavoolu. Sel juhul väljub gaas läbi spetsiaalsete düüsiavade, mis asuvad iga tera otsas.
Mis puutub reaktiivajami ökonoomsesse töösse, siis siin on see mehaanilisest halvem. Kui valida kõige ökonoomsem variant ainult reaktiivseadmete hulgast, siis parim on turboreaktiivmootor, mis asub sõukruvi labadel. Sellise seadme konstruktiivne loomine osutus aga liiga keeruliseks, mistõttu sellised seadmed laialdast praktilist kasutust ei leidnud. Seetõttu ei alustanud helikopterimootorite tehased masstootmist.

Esimesed turbovõlli seadmete mudelid
Esimesed turbovõlli mootorid loodi 60-70ndatel aastatel. Tuleb mainida, et sel ajal vastas selline varustus täielikult mitte ainult tsiviillennunduse, vaid ka sõjalennunduse kõikidele vajadustele. Sellised üksused suutsid pakkuda võrdsust ja mõnel juhul ka paremust konkurentide leiutistest. Turbovõlliga helikopterimootorite masstootmine saavutati TV3-117 mudeli kokkupanemisega. Väärib märkimist, et sellel seadmel oli mitmeid erinevaid modifikatsioone.
Lisaks sellele sai D-136 mudel ka hea leviku. Enne nende kahe mudeli väljaandmist toodeti D-25V ja TV2-117, kuid sel ajal ei suutnud need enam uute mootoritega konkureerida ja seetõttu nende tootmine peatati. Siiski on aus öelda, et neid toodeti üsna palju ja neid paigaldatakse endiselt nendele õhutranspordiliikidele, mis ilmusid üsna kaua aega tagasi.

Seadmete gradatsioon
80ndate keskel tekkis vajadus helikopteri mootori disaini ühtlustada. Probleemi lahendamiseks otsustati viia kõik sel ajal saadaolevad turbovõll- ja turbopropellermootorid ühisesse suurusvahemikku. See ettepanek võeti valitsuse tasandil vastu ja seetõttu tekkis jaotus 4 kategooriasse.
Esimesse kategooriasse kuuluvad seadmed võimsusega 400 hj. s., teine - 800 l. s., kolmas - 1600 l. Koos. ja neljas - 3200 l. Koos. Lisaks anti luba luua veel kaks helikopteri gaasiturbiinmootori mudelit. Nende võimsus oli 250 hj. Koos. (0 kategooria) ja 6000 l. Koos. (5. kategooria). Lisaks eeldati, et iga nende seadmete kategooria on võimeline tootma võimsust 15-25%.

Edasine areng
Uute mudelite arendamise ja ehitamise täielikuks tagamiseks tegi CIAM üsna ulatuslikku uurimistööd. See võimaldas saada teaduslik-tehnilise baasi (NTR), mille järgi selle valdkonna areng edasi läheb.
See NTZ näitas, et tulevaste põlvkondade helikopterite mootorite tööpõhimõte peaks põhinema Braytoni termodünaamilise tsükli lihtsal põhimõttel. Sel juhul on uute üksuste arendamine ja ehitamine paljulubav. Mis puutub uute mudelite konstruktsiooni, siis neil peaks olema ühevõlliline gaasigeneraator ja jõuturbiin, mille jõuvõlli väljund väljub selle gaasigeneraatori kaudu. Lisaks peab konstruktsioon sisaldama ka sisseehitatud käigukasti.
Vastavalt kõikidele teadusliku ja tehnilise tausta nõuetele algas Omski disainibüroos töö sellise helikopterimootori mudeli nagu TV GDT TV-0-100 tootmiseks, selle seadme võimsus pidi olema 720 hj. . s., ja otsustati seda kasutada sellisel masinal nagu Ka-126. Kuid 90ndatel peatati kogu töö, hoolimata asjaolust, et sel ajal oli seade üsna arenenud ja sellel oli ka võimalus suurendada võimsust sellistele näitajatele nagu 800–850 hj. Koos.
Tootmine ettevõttes OJSC Rybinsk Motors
Samal ajal viimistles Rybinsk Motors OJSC mootorimudelit, näiteks TV GDT RD-600V. Seadme võimsus oli 1300 liitrit. s. ja nad kavatsesid seda kasutada sellist tüüpi helikopterite jaoks nagu Ka-60. Sellise seadme gaasigeneraator valmistati üsna kompaktse konstruktsiooni järgi, mis sisaldas neljaastmelist tsentrifugaalkompressorit. Sellel oli 3 aksiaalset ja 1 tsentrifugaalastet. Sellise seadme pöörlemiskiirus ulatus 6000 p / min. Suurepärane täiendus oli see, et selline mootor oli lisaks varustatud kaitsega tolmu ja mustuse ning muude võõrkehade sissepääsu eest. Seda tüüpi mootorid on läbinud palju erinevaid katseid ja selle lõplik sertifitseerimine lõppes 2001. aastal.
Lisaks väärib märkimist, et paralleelselt selle mootori täiustamisega töötasid spetsialistid turbopropellermootori TVD-1500B loomise kallal, mida plaaniti kasutada An-38 helikopteritel. Selle mudeli võimsus on vaid 100 hj. Koos. suurem ja moodustas seega 1400 l. Koos. Mis puudutab gaasigeneraatorit, siis selle paigutus ja varustus olid samad, mis mudelil RD-600V. Nende väljatöötamise, loomise ja konfigureerimise käigus kavandati, et need moodustaksid aluse sellistele mootorite perekonnale nagu turbovõllid ja turbopropellermootorid.
Helikopteri mootoriga mootorratas
Tänapäeval on erinevat tüüpi seadmete tootmine üsna laialt edenenud. See kehtib peaaegu kõigi tööstusharude, sealhulgas mootorrataste tootmise kohta. Iga tootja püüdis alati oma uut mudelit konkurentidest ainulaadsemaks ja originaalsemaks muuta. Selle soovi tõttu lasi Marine Turbine Technologies hiljuti välja esimese mootorratta, mille jõuallikaks oli helikopter. Loomulikult mõjutas see muudatus suuresti nii masina konstruktsiooniosa kui ka selle tehnilisi omadusi.

Seadmete parameetrid
Loomulikult on helikopterimootoriga mootorratta omadustel ka ainulaadsed tehnilised parameetrid. Lisaks sellele, et selline uuendus võimaldas mootorratta kiirendada peaaegu kujuteldamatu 400 km/h-ni, on muidki omadusi, millele tasub samuti tähelepanu pöörata.
Esiteks on selle mudeli kütusepaagi maht 34 liitrit. Teiseks on varustuse kaal üsna märgatavalt kasvanud ja ulatub 208,7 kg-ni. Selle mootorratta võimsus on 320 hobujõudu. Maksimaalne võimalik kiirus, mida sellisel seadmel saavutada võiks, on 420 km/h ning selle velgede suurus on 17 tolli. Viimasena tasub mainida, et kopteri mootori töö mõjutas suuresti kiirendusprotsessi, mistõttu saavutab varustus mõne sekundiga oma piiri.

Esimene selline looming, mida Marine Turbine Technologies maailmale näitas, kandis nime Y2K. Siinkohal võib lisada, et täpne kiirendusaeg 100 km/h-ni võtab aega vaid poolteist sekundit.
Eelneva kokkuvõtteks võib öelda, et helikopterimootorite loomise tööstus on jõudnud kaugele ning praegune tehnoloogia areng on võimaldanud tooteid kasutada isegi sellistes seadmetes nagu mootorrattad.
Tänapäeval on helikopter kõige mitmekülgsem lennuk. Paljudes riikides nimetatakse seda " helikopter", mis moodustati kahest kreeka sõnast, tõlgitud tähendusega "spiraal" ja "tiib". Pikka aega ühes kohas hõljuv kopter suudab seejärel lennata igas suunas, isegi ilma pööret tegemata. Ja ta ei vaja ka spetsiaalseid maandumisradu, sest ta suudab vertikaalselt õhku tõusta ilma “jooksuta” ja vertikaalselt maanduda ilma “jooksuta”. Tänu sellele kasutatakse koptereid laialdaselt transpordiks raskesti ligipääsetavatesse kohtadesse, kustutus-, sanitaar- ja päästetöödel.
Peamine erinevus helikopteri ja lennuki vahel on see, et see tõuseb õhku ilma kiirenduseta ja tõuseb vertikaalasendis. Kopteril ei ole tiibu, vaid see-eest on katusel paiknev suur propeller ja sabas väike propeller. Helikopteri peamine eelis on manööverdusvõime. See võib hõljuda õhus pikka aega ja lisaks lennata tagurpidi. Maandumiseks ei vaja helikopter lennuvälja: see võib maanduda igal tasasel alal, isegi kõrgel mägedes.
Kahekümnenda sajandi alguses lendas prantslane P. Cornu esimesena maailmas helikopteriga. Tal õnnestus lennata 150 sentimeetri kõrgusele, see tähendab, et ta rippus oma leiutises kuskil täiskasvanud mehe rinna kõrgusel. Siis kestis see lend vaid 20 sekundit. Paul Cornu otsustas, et kõrgus on liiga kõrge ja ta võttis palju riske, mistõttu tõusis ta hiljem ainult turvavõrguga - rihma otsas.
Peamine disainielement, mis paneb helikopteri õhku tõusma ja seejärel läbi taeva hõljuma, on selle suur propeller. Ta kühveldab teradega pidevalt õhku, mistõttu kopter lendab. Samal ajal takistab sabarootor selle lendlinnu keha pöörlemist pearootori pöörlemissuunas vastupidises suunas. Selle helikopteri disaini leiutas 1940. aastatel vene insener.
Kui kopteri pearootor pöörleb, tekib reaktsioonijõud, mis pöörab seda vastupidises suunas. Sõltuvalt selle jõu tasakaalustamise meetodist on ühe rootoriga ja kahe rootoriga helikopterid. Ühe rootoriga helikopterites kõrvaldab reaktsioonijõud abisabarootori ja kahe rootoriga helikopterite puhul, kuna rootorid pöörlevad vastassuundades.

Helikopterite tüübid.
Rünnakuhelikopterite peamine eesmärk on lüüa vaenlase maapealseid sihtmärke. Tegemist on parimate sõjaväehelikopteritega, mistõttu nimetatakse selliseid masinaid ka ründehelikopteriteks. Nende relvad koosnevad juhitavatest tankitõrje- ja lennukirakettidest, raskekuulipildujatest ja väikesekaliibrilistest relvadest.

Ründehelikopter võib ühe lahinguga hävitada tohutul hulgal vaenlase varustust ja tööjõudu. Rünnakuhelikopter Eurocopter Tiger on teenistuses Prantsusmaa, Hispaania, Saksamaa ja Austraalia armeedega.
Vene helikopterit Ka-50 peetakse üheks kõige manööverdatavamaks ründehelikopteriks maailmas. Maailmas on ta laialt tuntud hüüdnime Black Shark all. See kopter on varustatud kahe suure propelleriga ja selle saba on nagu lennukil. Helikopter Black Shark sooritab kõige keerulisemaid vigurlende ja on võimeline hõljuma õhus kuni 12 tundi. Tänu kaasaegsele automatiseerimisele juhib Ka-50 ainult üks piloot.

1983. aastal loodi USAs Arizona osariigis ründehelikopter AN-64 Apache. Selle relvastusse kuulusid automaatne kiirlaskesuurtükk ja 16 juhitavat tankitõrjeraketti. Apache helikopter suudab saavutada kiiruse kuni kolmsada kilomeetrit tunnis ja lennata 6 kilomeetri kõrgusel. See kopter manööverdab suurepäraselt nii pilkases pimeduses kui ka halvimate ilmastikutingimuste korral. Apache helikopter on tänapäevalgi USA armee peamine kopter.

Transpordihelikopteriga saab vedada nii reisijaid kui ka lasti. Muud tüüpi helikopterid hõlmavad spetsiaalset päästekopterit ja kerget kaheistmelist uurimishelikopterit.

.
Helikopteri pearootor: lennuks kasutatakse ühte või mitut (tavaliselt kahte) pearootorit. Selle labad (kuni 8 tükki) toimivad nagu lennukitiivad ja tekitavad pöörlemisel vajaliku tõstejõu. Algul olid terad metallist ja alates eelmise sajandi viiekümnendate aastate lõpust klaaskiust.
Abirootori eesmärk on kõrvaldada reaktsioonijõud, mis pöörleb pearootori pöörlemisel helikopterit vastupidises suunas. Mõnikord võib propelleri asemel sabapoomile paigaldada jugaotsiku. Helikopteri mootor A ajab pea- ja abikruvid pöörlema. Tavaliselt on selleks kolb- või reaktiivmootor.

Piloot kokpitis V on juhtrool (rool), mida piloot keerab, et lennata talle vajalikus suunas. Rool muudab sõukruvi labade kallet, lennu ajal langetatakse üks sõukruvi kirjeldatava ringi osa teisest madalamale ja kopter lendab selles suunas.
Kere sisaldab kokpitti, reisijate- või lastiruumi ja mootoriruumi. Šassii - kuna kopter ei pea õhkutõusmiseks ja maandumiseks “sörkima”, asendatakse ratastel šassii väga sageli mugavamate suuskadega.
20.06.2015
Lennuki ja helikopteri lennu põhimõte
Iga õhus liikuv keha kogeb pidevalt vastupanu oma liikumisele viimase poolt. Seetõttu peate keha liigutamiseks ületama vastupanu ja rakendama teatud jõudu. Selles liikuva keha õhutakistuse jõud on otseselt võrdeline õhu tiheduse, keha pindala, liikumiskiiruse ruuduga ning oleneb keha kujust, selle sujuvusest ja asendist. õhuvoolus.
Selle aerodünaamika põhiseaduse alusel saab kindlaks teha, et kui eri keskkonda paigutatud erineva kuju ja suurusega kehadele antakse sama jõud, siis on nende liikumiskiirus erinev.
Kui asetada õhuvoolu erineva kujuga kehad - plaat, nurgelise kujuga keha ja tilgakujuline keha, siis selgub, et mida suurem on rõhuerinevus nende ees ja taga, seda suurem on keerise pindala, väiksem on kehade liikumise kiirus õhus ja seda suurem on takistusjõud. Seda jõudu, mis on suunatud otse kehade liikumisele, nimetatakse tõmbejõuks või takistuseks.
Nurgakujulise keha ümber voolamisel aeglustub vool vähem kui ümber plaadi, seetõttu on nii madalrõhu piirkond kui ka takistus väiksem (joonis 1).
Kui õhuvoolu asetada täiuslikuma aerodünaamilise kujuga tilgakujuline keha, on rõhk selle keha ees ja taga tähtsusetu, kuna õhuvoolud voolavad selle ümber tihedalt ega moodusta peaaegu turbulentsi. Selliste kehade juuresolekul on takistuse ületamiseks vaja kõige vähem jõudu. Eelnevast selgub, et lennunduses on määrava tähtsusega voolujoonelised kehakujud, mis tekitavad võimalikult madala takistuse ja ei tekita turbulentsi. Sellistele kehadele enne
Nende hulka kuuluvad pisarakujulised ja tiivakujulised kehad. Lennuki tiivad on selle peamised osad. Nad loovad lifti ja muudavad lennu võimalikuks.
Vaatleme üldiselt tõste põhjuseid (joonis 2). Laske tiival teatud rünnakunurga all õhus liikuda. Lendavat tiiba tabavad õhuosakesed painduvad ümber nii tiiva ülemise, kumera kui ka alumise, tasase või kergelt nõgusa pinna. Samas peavad ülalt ümber tiiva voolavad ojad läbima pikema vahemaa kui altpoolt ümber tiiva voolavad ojad. See tähendab, et ülemised ojad liiguvad suurema kiirusega kui alumised.

Bernoulli seadusest järeldub, et mida suurem on voolukiirus, seda väiksem on rõhk selles. Seetõttu tekib tiiva kohal väiksem rõhk kui tiiva all. Rõhuvahe tulemusena näib tiib ühelt poolt alandatud rõhu tõttu ülespoole imevat, teiselt poolt on see ka suurenenud rõhu tõttu toestatud. Selle tulemusena tekib tõstejõud, mis toimib alt üles ja on suunatud õhuvooluga risti. Lennukite ja helikopterite kui õhust raskemate sõidukite lend põhineb tiiva sellel omadusel.
Lennuk tõstab tõstejõudu ainult siis, kui see liigub piisava kiirusega. Selleks, et lennuk maapinnast üles tõuseks, peab selle tiiva tõus olema suurem kui lennuki kaal.
Selleks, et lennuk saaks õhus teatud kiirusega liikuda, peab ta pidevalt ületama õhutakistust ning stardijooksul ka rataste hõõrdumist maapinnal. Jõud, mis ületab õhutakistuse ja annab lennukile edasiliikumise kiiruse, on mootori poolt pöörleva propelleri tõukejõud.
Lennuki struktuur
Lennuki põhiosadeks on tiivad, kere, stabiilsus- ja juhtimisorganid, liikumis- ja maandumisorganid ning propeller-mootorirühm (joonis 3).
Tiivad on lennuki üks olulisemaid osi. Lennuki lennuvõime sõltub plaani ja ristlõike kujust, samuti tiibade suurusest.
Monoplaani tüüpi lennukil on üks tiib, kaheplaanilisel lennukil aga kaks tiiba. Ülemine ja alumine tiib on omavahel ühendatud tugipostidega. Aileronid on hingedega ühendatud ülemise ja alumise tiiva külge. Plaanis on õhusõiduki tiib koos aileroniga enamasti ristkülikukujuline, mille otsad on ümardatud elliptiliselt.

Lennuki kere (kere) on konstruktsiooni põhiosa, millega on ühendatud keskosa, tiivad, mootoriüksus, telik ja saba. Lisaks sellele mahub see lennuki kasulikku lasti (reisijad, lasti jne).
Lennuki stabiilsus- ja juhtimisorganid koosnevad aileronidest ja sabast.
Aileronid on osa tiivast ja on väikesed liigutatavad tiivad, mis asuvad lennuki tiibade otstes. Aileronid aitavad säilitada õhusõiduki külgstabiilsust ja kallutada seda ümber pikitelje pööramisel.
Lennuki saba koosneb horisontaalsetest ja vertikaalsetest sabadest. Nende abiga hoiab lennuk õhus pikisuunalist stabiilsust, tõuseb üles, laskub ja muudab lennusuunda.
Horisontaalne saba koosneb stabilisaatorist - fikseeritud osast, mis tagab õhusõidukile pikisuunalise stabiilsuse lennu ajal (vertikaalses suunas), ja liikuvast osast - liftidest. Need on vertikaaltasapinnal olevad õhusõiduki juhtseadised ja aitavad seda tõsta või langeda.
Vertikaalne saba koosneb uimest, mis on fikseeritult ühendatud kere tagumise osaga ja mis tagab lennukile stabiilsuse lennu ajal (horisontaalses suunas), ja liikuvast osast - roolist, mis on suunastabiilsuse organ ja juhitavus. Selle abil saate muuta lennuki lennusuunda paremale ja vasakule, st horisontaaltasapinnas.
Liikumis- ja maandumisorganiteks on saba või esirattaga telik. Lennuki telik on stardijooksuks vajalik stardi- ja maandumisseade, mis pehmendab maandumise mõju ja parandab juhitavust maapinnal ruleerimisel. Talvistes tingimustes paigaldatakse lumme mattumise eest kaitseks sabasuusk (suusk).
Lennuk maandub kolmes punktis, näiteks kahele esirattale ja ühele sabale.
Lennuki juhtimine toimub elevaatorite, tüüri ja aileronide abil.Peamine nõue lennukile lennu ajal on stabiilsus ja juhitavus kolme lennuki raskuskeset läbiva telje (joonis 4) suhtes – pikitelje XX1, põiktelje suhtes. YU1 ja vertikaaltelg ZZ1, mis on nende telgedega risti. Lennuki juhitavus pikitelje ümber saavutatakse iileronidega, risttelg liftidega ja vertikaaltelg rooliga. Lennuki juhtimiseks kasutatakse rooliratast ja jalgpedaale. Rool ühendub liftide ja aileronidega ning jalgpedaalid rooli ja sabarattaga. Rooli vasakule kõrvalekaldumisel tõusevad vasakpoolsete tiibade tiivad ja paremate tiibade tiivad madalamale; sel juhul saab lennuk vasaku kalda. Kui võtad tüüri, tõusevad liftid ja lennuk tõuseb. Kui liigutate tüüri endast eemale, laskub lennuk alla.

Rooli juhitakse jalaga pedaalile vajutades. Näiteks parema jalaga vajutades keerab tüür paremale ja lennuk paremale.
Propeller-mootori grupp koosneb mootorist, sõukruvist, mootori raamist, gaasi- ja õlivarustussüsteemist ning mootori juhtimisest. Lennuki propelleril on mitu paremale (päripäeva) pöörlevat laba.
Kohaldatavad õhusõidukid ja neile esitatavad nõuded
Metsa ja metsanduse aerofotograafia jaoks kasutatavatele lennukitele kehtivad erinevad nõuded.
Metsanduses, metsade kaitsmiseks tulekahjude eest, nende kustutamiseks, metsade õhumaksustamiseks, kahjulike putukate aerokeemiliseks tõrjeks ja muudeks töödeks, kasutatakse enim lennukeid YAK-12 ja AN-2. PO-2 lennuki tootmine on lõpetatud.
Lennuk Yak-12 on monolennuk, kinnise, kuid hästi klaasitud kabiiniga, kuhu mahub neli inimest, sealhulgas piloot. Mugav aerovisuaalseteks vaatlusteks, hea nähtavuse ja väikese lennukiirusega - 90-150 km/h. Suure- ja keskmisemahuline aeropildistamine sellest on võimalik ainult metsanduse otstarbel, kusjuures kehtivad madalad nõuded aerofotode lennukõrguse ja kaldenurga range järgimise osas.
Lennukit AN-2 kasutatakse laialdaselt metsade lennunduskaitseks tulekahjude eest, nende kustutamiseks, kahjulike putukate aerokeemiliseks tõrjeks, inimeste ja lasti transportimiseks, samuti aerofotograafiaks. Selle salongi mahub hõlpsasti kaks õhukaamerat, nende jaoks mõeldud erivarustus, sealhulgas raadiokõrgusmõõtur, statoskoop ja muud instrumendid, ning kuni kuueliikmeline meeskond. See võimaldab metsaalade samaaegset õhuvaatlust. Hea stabiilsusega õhus ja 130-210 km/h reisikiirusega sobib keskmise ja suuremahulise aerofotograafia jaoks. Selle nähtavus aerovisuaalsete vaatluste jaoks on halvem kui Yak-12 oma.
Lennukid LI-2 ja IL-12 on varustatud kõige arenenumate lennu- ja, suure kandevõime ja lennukiirusega (230-400 km/h) ning praktilise lennukõrgusega kuni 5000 m, mis võimaldab neil. kasutada väikese ja keskmise mõõtkava aerofotograafia jaoks.
Erinõuded aerofotograafia õhusõidukitele hõlmavad järgmist:
1. Vajadus omada piisavaid salongi mõõtmeid, et mahutada õhukaameraid ja kogu nende jaoks vajalikku varustust (raadiokõrgusmõõturid, statoskoobid ja juhtimisinstrumendid) ning luua võimalus neid lennu ajal juhtida ja väiksemaid rikkeid lahendada.
2. Hea nähtavuse võimalus õhumõõtjale ette, külgedele ja alla.
3. Võimalus kiiresti tõusta kõrgusele kuni 6000 m, reisikiirus kuni 350 km/h ja kütusevaru 6-8 lennutunniks.
4. Antud horisontaalsel lennurežiimil peab õhusõidukil olema hea piki-, külg- ja suunastabiilsus, et täita maastiku fotokujutise geomeetrilise kvaliteedi nõudeid.
Lennundusteenusteks metsanduses on vaja nii aerovisuaalseteks vaatlusteks mugavaid, suure kiirusvahemikuga – 80-200 km/h madalal lende võimaldavaid kergeid lennukeid kui ka mitmetonnise kandevõimega raskeid lennukeid. , mis on võimeline vedama lasti. , töötajad, langevarjurid, erinevad mehhanismid ja samal ajal sobivad maandumiseks ja õhkutõusmiseks väikestelt aladelt.
Helikopteri seade
Helikopter on õhust raskem lennuk. Selle võõrnimi on “helikopter”, mis tuleneb kreekakeelsetest sõnadest hélicos (kruvi) ja pteron (tiib), st rootorlennuk. Venekeelne nimi “helikopter” tähistab selle lennuki peamist omadust - “vertikaalset lendu”.
Helikopter on võimeline tõusma vertikaalselt, otse paigalt ja maanduma vertikaalselt, jooksmata. Õhus võib ta liikuda igas suunas ja võib liikumatult rippuda nii metsavõra kohal kui ka mitmesaja meetri kõrgusel. Helikopter võib maanduda keset metsa lagendikule, kuivale puudeta rabale jne. Tõusu- ja maandumiskiirused, stardi- ja jooksupikkused on null, seega ei vaja kopter spetsiaalseid lennuvälju, ta on mittevajaliku esindaja. lennuväljade lennundus. Helikopteril on lai kiirusvahemik - 0 kuni 150-200 km/h. Tänu nendele omadustele on see asendamatu side-, transpordi- ja erinevate ülesannete täitmiseks ligipääsmatute paikade uurimisel Põhja- ja Siberi asustamata tingimustes.
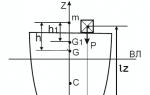
Helikopteri põhiosad on järgmised: pearootor, kere, mootor, jõuülekanne, helikopteri juhtimissüsteem, rooli- (saba) rootor ja telik (joon. 5).
Kopteri pearootor täidab tiiva rolli. Seda juhib mootor ja see loob tõste- ja tõukejõu. Lisaks on pearootor helikopteri juhtelement. Helikopterites kasutatakse kolme kuni nelja pika ja kitsa (läbimõõduga 15-20 liitrit või rohkem) labaga rootoreid. Põhirootori labad võivad aksiaalses hinges pöörata ümber oma telje.
Helikopteri vertikaalset liikumist juhitakse rootori kiiruse või labade nurga muutmisega. Kui rootori kiirus või laba nurk suureneb, suureneb tõstejõud ja kopter tõuseb. Kui propelleri kiirus langeb või paigaldusnurk väheneb, siis tõstejõud väheneb ja kopter väheneb. Kui tõstejõud on helikopteri lennuraskusega täielikult tasakaalustatud, "ripub" see õhus, laskumata või tõusmata. Niipea, kui tõstejõud ületab kopteri kaalu, tõuseb see üles. Pearootor kipub pöörlemisel kopterit pöörama rootori pöörlemisele vastupidises suunas, st tekib reaktiivne pöördemoment. Selle tasakaalustamiseks kasutatakse sabarootorit, mis pööramisel tekitab tõukejõu ja tasakaalustab väände.
Helikopteri kere täidab samu funktsioone, mis lennukil. See ühendab kõik osad üheks tervikuks. Selles on mootor, juhtimissüsteem, erivarustus, ülekandemehhanism, piloodi kabiin ja last.
Elektrijaam ja jõuülekanne. Kaasaegsetes helikopterites kasutatakse tavalisi õhkjahutusega sisepõlemis-kolbmootoreid, lennukite gaasiturbiine ja turboreaktiivmootoreid.
Mootori jõu ülekandmiseks pea- ja sabarootorile kasutatakse spetsiaalset mehhanismi, mida nimetatakse ülekandeks.
Näiteks ühe rootoriga kopteri juhtimine koosneb kolmest süsteemist; pearootori juhtseade, sabarootori juhtseade ja mootori gaasihoob.
Pearootorit juhitakse tavalise lennukitüüpi juhtpulgaga, kasutades automaatset pöördplaati ja "astmega gaasihooba". Sabarootorit juhitakse tavapäraste jalgpedaalidega. Mootorit juhib sama "astmega gaasihoob", mis juhib pearootorit.
Astmegaasi hooba nimetatakse nn, kuna selle liikumisel muutuvad samaaegselt propelleri samm ja mootori võimsus (gaasi). Näiteks kui “astmega gaasihoob” liigub allapoole, vähenevad paigaldusnurgad või pearootori laba samm ning ka mootori võimsus. Järelikult hakkab kopter laskuma.
Sabarootor paigaldatakse ainult ühe rootoriga helikopteritele. See tasakaalustab pearootori reaktiivmomenti ja tagab suunajuhtimise, st seda kasutatakse pöörde sooritamiseks.
Teliku funktsioon on maandumisel võimalike põrutuste ja põrutuste summutamiseks ning parkimisel toeks. Šassii võib olla ratastega, ujuv ja libisev.
Kergetel helikopteritel on tavaliselt kolm ratast, rasketel aga neli.
Helikopteri klassifikatsioon
Helikopterid erinevad rootorite arvu, asukoha ja pöörlemisviisi poolest. Vastavalt nendele omadustele võivad kopterid olla ühe rootoriga sabarootoriga, kahe rootoriga, mis paiknevad koaksiaalselt, kahe pikisuunas paikneva rootoriga, kahe põiki asetseva rootoriga, pearootori jugaajamiga jne (joonis 6). ).
Levinumad on ühe rootoriga kopterid, mille sabarootor on konstrueeritud M.L, Mil (MI-1, MI-4, MI-6, V-2, V-8 jne). Need on disainilt ja töölt lihtsad. Nende miinuseks on pikk saba (suured mõõtmed) ja sabarootori tööst tingitud märkimisväärne võimsuse kadu (kuni 10%).

Koaksiaalkonstruktsiooniga helikopteritel on mõlemad rootorid samal teljel, üksteise all. Ülemise kruvi võll läbib alumise kruvi õõnesvõlli seest. Rootorite vastassuundades pöörlemise tõttu on reaktiivne pöördemoment maha surutud. Need helikopterid on väikese suurusega, kerged, neil on hea juhitavus ja manööverdusvõime,
Koaksiaalhelikopterite puudused hõlmavad alumise rootori võimsuse kaotust, töötamist ülemise rootori visatud õhuvoolus ja arvutuste raskusi projekteerimise ajal.
Selle skeemi järgi luuakse kergeid helikoptereid N.I. Kamov: ühekohaline KA-10, kahekohaline KA-15 ja neljaistmeline KA-18.
Kahe pikisuunas paikneva rootoriga helikopteritel on üks rootor kere nina kohal ja teine saba kohal. Kruvid pöörlevad vastassuunas, et vastastikku tühistada reaktiivmoment. Nende miinuseks on see, et tagumine sõukruvi töötab õhukeskkonnas, mida on varem häirinud esipropeller ja see vähendab selle efektiivsust.
Kahe põikisuunalise rootoriga helikopterite propellerid on monteeritud kere külgedel asuvatele spetsiaalsetele taladele. Vastupidistes suundades pöörlevad need loovad hea külgstabiilsuse.
Pearootori pööramiseks kasutatakse helikopteri mootorit. Kui kopteril on mitu pearootorit, saab neid juhtida ühe ühise mootoriga või igaüht eraldi mootoriga, kuid nii, et rootorite pöörlemine oleks rangelt sünkroniseeritud.
Helikopteri mootori otstarve erineb lennuki, girolennuki või õhulaeva mootori otstarbest, kuna esimesel juhul pöörab see pearootori, mille kaudu see tekitab nii tõukejõu kui ka tõstejõu, muudel juhtudel pöörab see mootorit. traktori rootor, tekitades ainult tõukejõu.gaasijoa reaktsioonijõud (reaktiivlennukil), mis annab ka ainult tõukejõu.
Kui kopter on varustatud kolbmootoriga, tuleb selle konstruktsioonis arvesse võtta mitmeid kopterile omaseid omadusi.
Helikopter võib lennata edasiliikumise kiiruse puudumisel, st rippuda õhu suhtes liikumatult. Sel juhul puudub mootori, vesiradiaatori ja õlijahuti õhuvool ja jahutus, mille tagajärjel võib mootor üle kuumeneda ja rikki minna. Seetõttu on kopteril otstarbekam kasutada vesijahutuse asemel õhkjahutusega mootorit, kuna viimane ei vaja rasket ja kohmakat vedelikjahutussüsteemi, mis eeldaks kopteril väga suuri jahutuspindu.
Õhkjahutusega mootoril, mis paigaldatakse tavaliselt tunnelisse kopterile, peab olema sundõhuventilaatori ajam, mis tagab mootorile jahutuse hõljumisel ja tasasel lennul, kui kiirus on suhteliselt väike.
Samasse tunnelisse on paigaldatud õlijahuti. Mootori ja õli temperatuuri saab reguleerida tunneli sisse- või väljalaskeavade suurust muutes, kasutades liigutatavaid klappe, mida juhitakse kokpitist käsitsi või automaatselt.
Lennuki kolbmootori nimikiirus on tavaliselt umbes 2000 pööret minutis. On selge, et mootori pöörete täisarvu ei saa sõukruvile üle kanda, kuna sel juhul on labade otsa kiirused nii suured, et need põhjustavad suurel kiirusel seiskumise. Nendel põhjustel ei tohiks M-number labade otstes olla suurem kui 0,7–0,8. Lisaks oleks pearootor suurte tsentrifugaaljõudude korral raske konstruktsiooniga.
Arvutame 12 m läbimõõduga rootori maksimaalsed lubatud pöörded, mille juures labade otste arv M ei ületa 0,7 lennukõrguse korral 5000 m lennukiirusel 180 km/h,

Niisiis peab helikopteri mootoril olema suure reduktsiooniastmega käigukast.
Lennukis on mootor alati propelleriga jäigalt ühendatud. Vastupidav väikese läbimõõduga täismetallist sõukruvi peab kergesti vastu tõmblustele, mis kaasnevad kolbmootori käivitamisega, kui see ootamatult mitusada pööret üles võtab. Helikopteri rootor, millel on suur diameeter, mille mass on pöörlemisteljest kaugel ja mis on seetõttu suure inertsimomendiga, ei ole ette nähtud äkiliste muutuvate koormuste jaoks pöörlemistasandil; Käivitamisel võivad lõiketerad käivitustõmbluste tõttu kahjustuda.
Seetõttu on vajalik, et kopteri pearootor oleks startimise ajal mootorist lahti ühendatud, st mootor tuleb käivitada tühikäigul, ilma koormuseta. Tavaliselt tehakse seda hõõrd- ja nukksidurite lisamisega mootori konstruktsiooni.
Enne mootori käivitamist tuleb sidurid välja lülitada ja mootori võlli pöörlemine ei kandu üle pearootorile.
Kuid ilma koormuseta võib mootor arendada väga suuri kiirusi (pöörlemine), mis põhjustab selle hävimise. Seetõttu ei saa käivitamisel enne sidurite sisselülitamist mootori karburaatori gaasipedaali täielikult avada ja seadistatud kiirust ületada.

Kui mootor juba töötab, on vaja see hõõrdsiduri abil ühendada pearootoriga.
Hõõrdsidurina võib kasutada hüdraulilist sidurit, mis koosneb mitmest metallist kettast, mis on kaetud suure hõõrdeteguriga materjaliga. Osa kettaid on ühendatud mootori käigukasti võlliga ja vahekettad peavõlli ajamiga pearootori külge. Kuni kettad pole kokku surutud, pöörlevad nad üksteise suhtes vabalt. Ketaste kokkusurumine toimub kolvi abil. Kõrgsurveõli andmine kolvi alla paneb kolvi liikuma ja surub kettad järk-järgult kokku. Sel juhul edastatakse mootori pöördemoment propellerile järk-järgult, keerates sõukruvi sujuvalt lahti.
Kabiini paigaldatud pöördeloendurid näitavad mootori ja propelleri pöördeid. Kui mootori ja sõukruvi pöörlemiskiirused on võrdsed, tähendab see, et hüdraulilised sidurikettad surutakse tihedalt üksteise vastu ja sidurit võib lugeda ühendatuks jäiga sidurina. Sel hetkel saab koera sidurit sujuvalt (ilma tõmblemiseta) sisse lülitada.
Lõpuks, et tagada isepöörlemise võimalus, tuleb pearootor automaatselt mootorist lahti ühendada. Kuni mootor töötab ja propellerit keerab, on koera sidur sisse lülitatud. Kui mootor ebaõnnestub, väheneb selle kiirus kiiresti, kuid pearootor jätkab inertsist mõnda aega pöörlemist sama pöörete arvu juures; sel hetkel lülitub koera sidur lahti.
Mootori küljest lahti ühendatud pearootor saab seejärel isepöörlevas režiimis edasi pöörelda.
Lend treeningu eesmärgil toimub isepöörlemise režiimis väljalülitatud või töötava mootoriga; viimasel juhul vähendatakse selle kiirust nii palju, et propeller teeb (arvestades vähendamist) rohkem pöördeid kui mootori väntvõll.
Pärast helikopteri maandumist vähendatakse kõigepealt mootori pöörlemiskiirust, sidur vabastatakse ja seejärel mootor seiskub. Kopterit parkides tuleb propeller alati pidurdada, muidu võib see tuuleiilide mõjul pöörlema hakata.

Helikopteri mootori võimsus kulub pearootori pöörlemise takistuse ületamiseks, sabarootori pöörlemiseks (6-8%), ventilaatori pöörlemiseks (4-6%) ja kadude ületamiseks. ülekanne (5-7%).
Seega ei kasuta pearootor kogu mootori võimsust, vaid ainult osa sellest. Propelleri mootori võimsuse kasutust arvestatakse koefitsiendiga, mis näitab, kui suurt osa mootori võimsusest rootor kasutab. Mida suurem see koefitsient, seda arenenum on helikopteri disain. Tavaliselt = 0,8, st propeller kasutab 80% mootori võimsusest:
Kolbmootori võimsus oleneb silindritesse tõmmatud õhu massilaengust või ümbritseva õhu tihedusest. Tänu sellele, et ümbritseva õhu tihedus kõrguse kasvades väheneb, väheneb pidevalt ka mootori võimsus. Sellist mootorit nimetatakse madala kõrgusega mootoriks. Tõstmisel 5000–6000 m kõrgusele väheneb sellise mootori võimsus ligikaudu poole võrra.
Selleks, et mootori võimsus mitte ainult ei väheneks, vaid isegi tõuseks kuni teatud kõrguseni, paigaldatakse mootorisse õhu imitorustikule ülelaadur, mis suurendab sisselaskeõhu tihedust. Tänu ülelaadurile suureneb mootori võimsus kuni teatud kõrguseni, mida nimetatakse disainikõrguseks, ja seejärel väheneb samamoodi nagu madalal mootoril.
Ülelaadur käivitatakse mootori väntvõllilt. Kui käigukastis väntvõllilt ülelaadurile on kaks kiirust ja teise kiiruse sisselülitamisel suureneb ülelaaduri kiirus, siis on kõrguse suurenemisega võimalik võimsust suurendada kaks korda. Sellisel mootoril on juba kaks disainikõrgust.
Helikopteritel on reeglina ülelaaduriga mootorid.