Kalde- ja kaldenurkade mõõtmine, libisemise mõõtmine. Vaadake, mis on "rull" teistes sõnaraamatutes. Laevade veeremise vältimine
Küljel) - lennuki sümmeetriatasandi kõrvalekalle kohalikust vertikaalist maapinnani. Seda iseloomustab K-nurk ja K-kiirus. Rullinurk(γ) – nurk risttelje OZ ja normaaltelje OZ(m) vahel ( cm. koordinaatsüsteem) nihutatud asendisse, kus lengerdusnurk on null. Nurka K loetakse positiivseks, kui OZg-telg on joondatud OZ-teljega, pöörates seda telge mööda vaadates päripäeva ümber OX-telje. Kiiruse koordinaatsüsteemi (SV) orientatsiooni määramisel normaalsüsteemi suhtes kasutatakse seda kiiruse veeremise nurk(γ)a, defineeritud sarnaselt nurgaga (γ), kuid OZ-telje asemel arvestatakse külgmist OZa-telge. Nende kasutatavate rakettide liikumise kirjeldamisel aerodünaamiline kaldenurk(φ)n, mis on määratletud kui nurk OY-telje ja OYn CK-telje vahel, mis on seotud ruumilise rünnakunurgaga.
Lennuki veereks nimetatakse ka liikumist, mille puhul kaldenurk muutub; iseloomustatud veeremiskiirus(ω)x - lennuki nurkkiiruse projektsioon selle pikiteljele. Pöörlemiskiirus loetakse positiivseks, kui lennuk pöörleb päripäeva ümber OX-telje. K. analüüsimisel kasutavad nad sageli mõõtmeteta kiirus K. -(ω)x, mis on seotud K. kiirusega seosega
(ω) = (ω)xl/2V,
kus l on lennuk, V on lennukiirus.
Nimetatakse ka K mõõtmeteta kiirust spiraali nurk kirjeldab tiivaots.
Lennuki manöövreid kasutatakse näiteks pöörete ajal, vigurlendude sooritamisel ja maandumislähenemisel, et neutraliseerida lennuki trajektoori nihkumist raja telje suhtes. Käigukasti juhtimist teostavad külgmised juhtorganid ( cm. Juhtelemendid). Lennuki spontaanset lendu nimetatakse kukkumiseks. cm. ka Külgsuunaline liikumine.
Lennundus: entsüklopeedia. - M.: Suur vene entsüklopeedia. Peatoimetaja G.P. Svištšov. 1994 .
Sünonüümid:
Vaadake, mis on "Kren" teistes sõnaraamatutes:
pank- rulli ja... Vene õigekirjasõnaraamat
pank- rulli / ... Morfeemilise õigekirja sõnastik
pank- a, m. carène f., inglise keel. carren, eesmärk krengen 1. mor. Laeva veealune või alumine osa või pind veeliinil. Mereteadus. 386. // Sl. 18 10 249. 2. Laeva kallutamine ühele küljele. Sl. 18. Püssidega kallakut katsetades kallutus mõnevõrra vähenes. CSF 2 30 ... Vene keele gallicismide ajalooline sõnastik
Lennuki Kren mudelid (prantsuse carène keel, laeva veealune osa või inglise kren gen ... Wikipedia
- (inglise careen, ladina keelest carina - laeva veealune osa). Kreeniga laeva seisukord, laeva kõrvalekalle tuule või raskuste ühele küljele kandumise tõttu, veealuseks remondiks. Vene keele võõrsõnade sõnastik.... Vene keele võõrsõnade sõnastik
cm… Sünonüümide sõnastik
Kren, rull, abikaasa. (spetsialist.). 1. Laeva või lennuki kalle küljele. Aurik liigub tugeva kreeniga. Anna rulli (kalluta). 2. ülekanne Eelarvamus, muutus poliitilises orientatsioonis (ajaleht). Austria sotsialistid on teinud suure nihke paremale... Ušakovi seletav sõnaraamat
A; m. 1. Laeva või lennuki külgne kalle. Andke laeva K. K. tõusud. 2. Suunamuutus, pööre poliitilises, sotsiaalses jne. tegevused. K. vasakule, paremale. Võtke see küljele. * * * ROLL ROLL (hollandi keelest krengen - laeva panemiseks ... ... entsüklopeediline sõnaraamat
KREN, ah, abikaasa. 1. Kallutage ühele küljele (laeva, lennuki, sõiduki). Anna lennuk tuppa 2. transfeer. Ühepoolne suunamuutus. Ožegovi seletav sõnaraamat. S.I. Ožegov, N. Yu. Švedova. 1949 1992 … Ožegovi seletav sõnaraamat
ROLL, vaata kanna. Dahli seletav sõnaraamat. IN JA. Dahl. 1863 1866 … Dahli seletav sõnaraamat
- (List, kreen, kreen) 1. Laeva põikkalle. 2. Lennuki kalle ümber pikitelje. 3. Laeva veealune osa piki veeliini (vana). Samoilov K.I. Meresõnaraamat. M.L.: NSV Liidu NKVMF Riiklik Mereväe Kirjastus ... Meresõnaraamat
Raamatud
- Minu õrn kallas, Krenev P.. Kuulsa moodsa prosaisti raamatus on teoseid, mis räägivad elust Venemaa põhjaosas Valge mere kaldal asustavatest tänapäeva pomooridest. See on usaldusväärne, tõsi lugu ...
Vaatleme ρ kaaluva lasti liikumist laeval risti-horisontaalses suunas tüürpoordi poole kaugusel l y. Koorma selline liikumine põhjustab veeremise ja raskuskeskme nihkumise. laev lasti liikumisjoonega paralleelses suunas ρ. Esialgne külgstabiilsus sel juhul ei muutu, kuna kehtib Ts.V. ja C.T., samuti metatsentrilist raadiust ja metatsentrilist kõrgust ei suurendata. Uues C.T.-s rakendatud laeva raskusjõud ja uues C.E-s rakendatud toetusjõud toimivad piki sama vertikaali, risti uue veeliiniga B 1 L 1.
Riis. 1
Samal ajal võtab laev uue tasakaaluasendi, kaldudes kaldenurga alla. Jooniselt järeldub, et momendi, mis ilmneb koormuse liikumisel üle laeva, saab määrata avaldisega:
Mkr=P lу cos θ
Püstuvusmomenti saab määrata metatsentrilise stabiilsusvalemiga. Laev on muudetud jõudude süsteemi mõjul tasakaalus, seetõttu on ka momendid Mcr ja Mθ võrdsed:
Р·lu·cos θ=D’·h·sin θ
Lahendades selle võrrandi θ jaoks, saame valemi veerenurga määramiseks koormuse põikisuunalise liikumise ajal:
tgΘ=Р·luD'·h
Kuna kaldenurk on väike, saab viimase avaldise kirjutada järgmiselt:
Θ=Р·luD’·h
Ülaltoodud valemit kasutatakse juhtudel, kui rullimise nurgad ei ületa 10-15 kraadi.
Laeva stabiilsuse muutus veose vertikaalsuunas liigutamisel
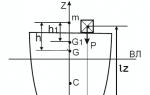
Oletame, et tasasel kiilul istuval ja tasakaalus laeval nihutatakse P kaaluv koorem vertikaalselt kaugusele l z. Kuna aluse veeväljasurve lasti liikumise tõttu ei muutu, siis esimene tasakaalutingimus on täidetud (laev säilitab süvise). Tuntud teoreetilise mehaanika teoreemi järgi on C.T. laev liigub punkti G 1, mis asub raskuskeskme eelmise asukohaga samal vertikaalil. anum G. Vertikaal ise läbib nagu varemgi Ts.V. laev C. Seega on teine tasakaalutingimus täidetud, seetõttu ei muuda laev koormuse vertikaalsel liikumisel oma tasakaaluasendit (ei ilmu veeremist ega trimmi).
 Riis. 2
Riis. 2
Vaatleme nüüd esialgse külgstabiilsuse muutust. Tulenevalt asjaolust, et vette uppunud laevakere kuju ja veeliiniala kuju ei ole muutunud, on Ts.V. ja risti metatsenter (t. m) jääb koormuse vertikaalsuunas liikumisel muutumatuks. Ainult C.T. liigub. laev punktist G punkti G 1. Segmendi GG 1 saab leida avaldise abil:
Kui enne koormuse liigutamist oli risti metatsentriline kõrgus h, siis pärast liigutamist muutub see väärtuse GG 1 võrra. Meie puhul on ristisuunalise metatsentrilise kõrguse muutus Δh = GG 1 negatiivse märgiga, kuna C.T. ristsuunalise metatsentri poole asuv anum, mille asend, nagu oleme kindlaks teinud, jääb muutumatuks, vähendab metatsentrilist kõrgust. Seetõttu on risti metatsentrilise kõrguse uus väärtus:
h1=h-Р lzD (1)
Ilmselgelt tuleb koormuse allapoole nihutamise korral uue metatsentrilise kõrguse h1 võrrandi parempoolses servas teise liikme ette panna plussmärk (+).
Avaldisest (1) järeldub, et laeva püstuvuse vähenemine on võrdeline lasti massi ja selle kõrguse liikumise korrutisega. Lisaks, kui kõik muud asjaolud on võrdsed, on külgstabiilsuse muutus suure veeväljasurvega laeval suhteliselt väiksem kui väikese D-ga laeval. Seetõttu on suurtel laevadel suhteliselt suurte koormate liikumine ohutum kui laeval. väikesed laevad.
Võib selguda, et GG 1 väärtus liigub ülespoole C.T. anum on suurem kui väärtus h ise. Siis muutub esialgne külgstabiilsus negatiivseks, st laev ei suuda püsida püstises asendis.
Laeva püstuvuse muutmine lasti vastuvõtmisest või eemaldamisest (lossimisest).
Üldiselt toimub lasti vastuvõtmisel või eemaldamisel laeva keskmise süvise muutus veeväljasurve muutumise, veeremise ja trimmi ilmnemise tõttu, mis on tingitud kaalujõu toimejoone nihkest joone suhtes. üleslükkejõu mõjust ja stabiilsuse muutumisest keskpunkti asendi muutumise tagajärjel. T. ja Ts.V.
Probleemi, mis puudutab mõne P kaaluga lasti vastuvõtmist mis tahes punktis A koordinaatidega Xp, Yp, Zp, maandumisele ja stabiilsusele saab jagada kaheks lihtsamaks ülesandeks.
Esimene neist käsitleb P kaaluva koorma vastuvõtmise mõju maandumisele ja stabiilsusele, kui C.T. vastuvõetav last asub DP-s ja samal vertikaalil efektiivse veepiiri ala raskuskeskmega.
Teises ülesandes käsitleme aluse randumise muutust sama lasti horisontaalselt teisaldamisel. Selline ülekanne, nagu varem näidatud, ei mõjuta esialgset stabiilsust, seetõttu käsitletakse allpool ainult esimest probleemi.
Laeva tekile võeti koorem kaaluga P, C.T. mis asub DP-s põhitasapinnast zр kaugusel. Enne lasti vastuvõtmist oli laeva veeväljasurve Do ja süvis T. Pärast lasti vastuvõtmist sai laeva veeväljasurveks D 1 = D + P ja süviseks T 1 = T + ΔT. Koorma vastuvõtmisel muudavad asendit kõik kolm külgstabiilsust iseloomustavat punkti; suuruskeskus - laeva süvise ja sellest tulenevalt vette sukeldatud laevakere mahu muutumise tõttu; raskuskese - laeva koormuse muutumise tõttu ja põiki metatsenter - veepiiri ala kuju ja vees sukeldatud laevakere osa mahu muutumise tõttu.
Metatsentriline kõrgus, mis iseloomustab laeva stabiilsust, muutub kõigi ülaltoodud põhjuste tõttu järgmiselt:
∆h=PD+P(T+∆T2h-Zp)
Ristsuunalise metatsentrilise kõrguse uus väärtus pärast koormuse vastuvõtmist või eemaldamist (kulutamist) on:
h1=h+∆h=h+±PD±P(T±∆T2-h-Zp)
Siin vastab plussmärk koormuse vastuvõtmisele, miinusmärk selle eemaldamisele (kulule).
Soovitatav lugemine:
VERTIKAALI KONSTRUKTSIOON LENNUKI FÜÜSILISE PENDLI KASUTAMISEGA
Lennuki juhtimisel peate teadma selle asukohta maa horisondi tasapinna suhtes. Lennuki asendit horisontaaltasapinna suhtes määravad kaks nurka: kaldenurk ja kaldenurk. Kaldenurk on nurk lennuki pikitelje ja horisontaaltasapinna vahel, mõõdetuna vertikaaltasapinnal. Kaldenurk - õhusõiduki pöördenurk ümber selle pikitelje, mõõdetuna lennuki pikitelge läbivast vertikaaltasapinnast
Joonis 4.1 füüsiline pendel – vertikaalne determinant lennukil.
Seega saab lennuki asendit horisondi tasapinna suhtes määrata, kui lennukil on teada tõelise vertikaali suund ehk siis Maa ja lennuki keskpunkti läbiva joone suund ning kõrvalekalle. mõõdetakse sellest suunast.
Maapinnal olevast vertikaalist kõrvalekaldumise määrab tavaline loodijoon, st füüsiline pendel.
Oletame, et lennukile, mis lendab horisontaalselt kiirendusega, on paigaldatud füüsiline pendel A(joonis 4.1). Pendli massini T jõud hakkavad mõjuma raskuskiirendusest g ja kiirendusest tulenev inertsiaaljõud a. Nende jõudude momentide summa pendli riputuspunkti suhtes on null ja seda väljendatakse võrrandiga
Kus l- pendli pikkus;
α - pendli läbipaindenurk
Võrrandist (4.1) saame
![]() (4.2)
(4.2)
Järelikult kaldub kiirendusega liikuvale objektile paigaldatud pendel kiirendusele vastupidises suunas ja näitab nn näilist vertikaali. Kaasaegsetel transpordilennukitel võivad olla raskuskiirendusega proportsionaalsed kiirendused, seega võib pendli vertikaalist kõrvalekaldumise nurk α ulatuda oluliste väärtusteni. Seega ei sobi füüsiline pendel vertikaalasendi suuna määramiseks ehk kaldenurga ja kaldenurga mõõtmiseks, kui lennuk lendab kiirendusega.
LENNULINE HORISONS
Varem märgiti, et pendli abil saab vertikaali määrata vaid kiirenduseta lennu ajal ning vaba kolmekraadine güroskoop suudab hetkekiirendustest sõltumata antud ruumilist asendit säilitada vaid lühikest aega.
Seetõttu on need kaks seadet omavahel ühendatud, kasutades mõlema positiivseid omadusi. Pendli abil kiirenduse puudumisel seatakse güroskoobi peatelg vertikaalselt. Neil hetkedel, kui kiirendused pendlile mõjuvad, lülitatakse see välja ja güroskoop töötab "mälu" režiimis.

Seadet, millega pendel güroskoobile mõjub, nimetatakse pendli korrektsioonisüsteemiks. Sellise korrektsiooniga güroskoopi nimetatakse gürovertikaalseks. Güroskoopi vertikaali, mis näitab visuaalselt lennuki asukohta maa horisondi suhtes, nimetatakse asendiindikaatoriks.
Hoiakuindikaatorid kasutavad elektrolüütilist pendlit (joonis 4.2), mis on tasane vasest kauss 3, täidetud juhtiva vedelikuga 1 suure elektritakistusega. Kausis on nii palju vedelikku, et sinna jääb ruumi õhumullile 2 . Kauss on suletud isoleermaterjalist kaanega, millesse on paigaldatud neli kontakti 4, viies kontakt on kauss ise. Kui pendel on horisontaalselt paigutatud, on kõik neli kontakti ühtlaselt vedelikuga kaetud ning nende ja kausi vaheliste alade elektritakistus on sama. Kui kauss kaldub, paljastab kausi ülemises asendis olev õhumull ühe kontaktidest ja muudab seeläbi piirkonna elektritakistust, mis väikeste nurkade (kuni 30") korral on võrdeline kaussi nurgaga. kausi kalle.
 Pendli kontaktid on kaasatud elektriahelasse, nagu on näidatud joonisel fig. 4.3. Kui pendel kaldub, on tihvtide 0 ja 1 vaheline takistus suurem kui tihvtide 0 ja 3 vaheline takistus. i 1 mis läbib juhtmähist OY 1, siis on voolu vähem i 2 mähisega OY 2 korrektsioonimootor. Mähised OY 1 ja OY 2 on mähitud vastumähisega, seega vahevool Δ i=i 2 -i 1 tekitab magnetvoo, mis koosmõjus väljamähise magnetvooga tekitab pöördemomendi. Mootori rootor on kinnitatud kardaani telje külge, seetõttu rakendatakse kardaani teljele moment, mille mõjul güroskoop pretsesseerub. Güroskoobi pretsessioon jätkub seni, kuni piki kardaani vedrustuse telge on hetk ja see hetk toimib seni, kuni pendel paigaldatakse horisontaalasendisse, mille juures vool i 1 =i 2. Ühendades pendli sisemisega ,
kardaanvedrustuse raam ja parandusmootorite paigutamine piki vedrustuse telgesid, saame elektromehaanilise pendlikorrektsiooniga gürovertikaali (joon. 4.4). Seega elektrolüütiline pendel 1
, mis toimib parandusmootorite kaudu güroskoopile 2
Ja 3
, viib güroskoobi peatelje alati vertikaalasendisse. Kui korrektsioon on välja lülitatud, säilitab güroskoop oma varasemat positsiooni ruumis täpsusega, mille määravad tema enda vead, näiteks tänu pretsessioonile, mis on põhjustatud hõõrdemomentidest piki kardaani telge.
Pendli kontaktid on kaasatud elektriahelasse, nagu on näidatud joonisel fig. 4.3. Kui pendel kaldub, on tihvtide 0 ja 1 vaheline takistus suurem kui tihvtide 0 ja 3 vaheline takistus. i 1 mis läbib juhtmähist OY 1, siis on voolu vähem i 2 mähisega OY 2 korrektsioonimootor. Mähised OY 1 ja OY 2 on mähitud vastumähisega, seega vahevool Δ i=i 2 -i 1 tekitab magnetvoo, mis koosmõjus väljamähise magnetvooga tekitab pöördemomendi. Mootori rootor on kinnitatud kardaani telje külge, seetõttu rakendatakse kardaani teljele moment, mille mõjul güroskoop pretsesseerub. Güroskoobi pretsessioon jätkub seni, kuni piki kardaani vedrustuse telge on hetk ja see hetk toimib seni, kuni pendel paigaldatakse horisontaalasendisse, mille juures vool i 1 =i 2. Ühendades pendli sisemisega ,
kardaanvedrustuse raam ja parandusmootorite paigutamine piki vedrustuse telgesid, saame elektromehaanilise pendlikorrektsiooniga gürovertikaali (joon. 4.4). Seega elektrolüütiline pendel 1
, mis toimib parandusmootorite kaudu güroskoopile 2
Ja 3
, viib güroskoobi peatelje alati vertikaalasendisse. Kui korrektsioon on välja lülitatud, säilitab güroskoop oma varasemat positsiooni ruumis täpsusega, mille määravad tema enda vead, näiteks tänu pretsessioonile, mis on põhjustatud hõõrdemomentidest piki kardaani telge.
Parandussüsteemid erinevad omaduste tüüpide poolest. Paranduskarakteristikuks on korrektsioonimootori poolt välja töötatud pöördemomendi muutumise seadus, mis sõltub güroskoobi peatelje kõrvalekaldest vertikaalasendist.
Lennundusinstrumentides on segaparanduskarakteristikud enim levinud (joonis 4.5). Pindala ±Δ α määrab süsteemi surnud tsooni. Kuni teatud äärmuslike nurkadeni α jne,
β korrigeerimise hetkel M k muutub võrdeliselt nurkadega α Ja β ja muutub seejärel konstantseks.
GÜROVERTIKALIDE VEAD
Viga hõõrdemomentide tõttu raami ja raami telgedes. Kardaani telgedes on paratamatult hõõrdemomente, mistõttu güroskoobi pretsessioon korrektsioonimomentide mõjul jätkub seni, kuni parandusmoment on hõõrdemomendist suurem. Güroskoobi liikumine peatub, kui need hetked on võrdsed:
Sellest järeldub, et güroskoobi peatelg ei jõua nurkade all vertikaalasendisse α * Ja β *:

Seega on kardaani telgede hõõrdumise tõttu gürovertikaalil stagnatsioonitsoon, mis sõltub kardaani telgede hõõrdemomendi suurusest ja loomulikult pendli korrektsiooni surnud tsoonist (vt joonis 1). 4.5). Mida suurem on korrektsioonimootorite poolt välja töötatud eripöördemoment, seda väiksem on stagnatsioonitsoon. Liiga suur konkreetne hetk toob pööretel kaasa olulisi vigu. Hoiakunäitajate puhul on stagnatsioonitsoon tavaliselt 0,5-1°.
Pööramisviga. Kui tasapind teeb pöörde nurkkiirusega ω, siis pendlil lisaks raskusjõule mg, tsentrifugaaljõud on endiselt aktiivne mω 2 R, ja pendel ei paigaldata piki tegelikku vertikaali, vaid piki nende jõudude resultanti (joonis 4.7). Signaalid saadetakse parandusmootoritele ja güroskoobi peatelg seatakse näiliselt vertikaalsesse asendisse. See protsess toimub, mida kiiremini, seda suuremad on konkreetsed hetked k x , k y parandussüsteemid. Nagu on näha jooniselt 3.10, ei tööta külgmise korrigeerimise süsteem kurvis üldiselt korralikult. Seetõttu on tänapäevaste güro-vertikaalide ja tehishorisontide puhul külgkorrektsioon pööretel spetsiaalse seadmega keelatud.
Loomulikult põhjustavad sarnaseid vigu ka lennuki lineaarsed kiirendused, näiteks kiiruse suurenemisega. Seetõttu on sellistes hoiakunäitajates nagu AGD-1 ka pikisuunaline korrektsioon keelatud. Kui korrigeerimine on välja lülitatud, töötab gürovertikaalne mälurežiim. Pärast seda, kui lennuk on kiirendustega seotud evolutsiooni lõpetanud, lülitub parandussüsteem sisse ja viib güroskoobi peatelje vertikaalasendisse, kui see on "mälu" režiimis töötamise ajal kõrvale kaldunud.
Güromeetrites ilmneb viga nii Maa igapäevasest pöörlemisest kui ka lennuki enda lennukiirusest, kuid transpordilennukitel ei ületa see viga mitut kaareminutit.
ilmub punane lipp 12. See lüliti ühendab põiksuunalise korrektsioonimootori juhtmähised 4 faasiga C, takistusest möödaminek R2, ja seeläbi suureneb

vool mootoris ja seega ka parandusmoment, mida see arendab.
Pärast seda, kui seade jõuab nominaalsesse töörežiimi, lüliti 10 tuleks tagasi algasendisse (lipp kaob vaateväljast). Nominaalses töörežiimis korrektsioonimootori juhtmähised 4 ühendatud faasiga C läbi paranduslüliti VK-53RB kontaktide.. Kui lennuk teeb pöördeid, siis paranduslüliti lülitab põiki parandusmootori välja, muidu tekib suur pöördeviga.
AIR HORIZONT AGI-1s
Asendinäidik on mõeldud lennuki asukoha määramiseks kosmoses tegeliku horisondijoone suhtes, sellel on sisseehitatud libisemisnäidik. Tsiviillennunduse transpordilennukitele paigaldatakse hoiakuindikaator.
Seadme kinemaatiline diagramm on näidatud joonisel fig. 4.8, lihtsustatud elektriline - joonisel fig. 4.9 ja skaala vaade on joonisel fig. 4.10.

Vaatleme seadme tööd. Güroskoobi oma pöörlemistelg (vt joonis 4.8) vastavalt elektrolüütilise pendli signaalidele 8 parandusmootorite kasutamine 3 Ja 10 paigaldatud ja hoida vertikaalses asendis.
AGI-lc asendinäidiku eripäraks on selle võime töötada piiramatus kalde- ja kaldenurkade vahemikus. See on võimalik tänu täiendava jälgimisraami kasutamisele seadmes. 4, mille telg langeb kokku lennuki pikiteljega ja raami ennast saab mootori abil lennuki suhtes pöörata 11 . Täiendava jälgimisraami eesmärk on tagada risti güroskoopi enda pöörlemise telje ja kardaani välisraami teljega. Kui lennuk veereb, siis välimine raam 5 Kardaanvedrustus pöörleb ümber sisemise raami telje. See pöörlemine on fikseeritud lülitiga 9 (vt joonis 4.8 ja 4.9), millega mootor sisse lülitatakse 11 , pöörates jälgija raami 4 ja koos sellega ka raam 5 vastupidises suunas. Seetõttu on güroskoobi enda telje risti 6 ja välisraami teljed ei ole rikutud. Kui õhusõiduk teeb lülitit kasutades kaldemuutusi nurga all, mis on suurem kui 90˚ 12 mootori pöörlemissuund muutub 11. Näiteks kui lennuk teeb Nesterovi silmuse kujundi, siis sel hetkel, kui ta satub ümberpööratud olekusse, st muudab oma asendit güroskoobi peatelje suhtes 180° võrra, muutub lennuki pöörlemissuund. mootor 11 Järgija raami pööramiseks tuleks see ümber pöörata.
Kui lennuk teostab sammu evolutsiooni, veereb lennuk ümber välise kardaanraami telje ja seetõttu on selle tööulatus 360°.
Lennuki asukoha näitamine horisondi tasapinna suhtes AGI-1-des toimub õhusõiduki silueti (vt joonised 4.8 ja 4.10), mis on paigaldatud instrumendi korpusele, ja sfäärilise skaalaga. 2, ühendatud güroskoobi kardaanvedrustuse sisemise raami 7 teljega. Sfääriline skaala 2 horisondijoone kohal pruuniks ja horisondi joonest allpool siniseks. Pruunil väljal on kiri “Descent”, sinisel väljal kiri “Rise”. Seega liigub ronimisel lennuki siluett koos lennuki endaga sinisele väljale, nagu on näidatud joonisel fig. 3.18, V, alates skaalast 2, güroskoopiga seotud, jääb ruumis liikumatuks. Tuleb märkida, et AGI-lc hoiaku indikaatori kõrguse näidud on vastupidised AGB-2 omadele. See on äärmiselt oluline, kuna mõlemad instrumendid on mõnikord paigaldatud samale lennukile.

Joonis 4.9 Asendinäidiku AGI-1 elektriskeem.

Güroskoopi isepöörlemistelje vertikaalasendisse viimise aja vähendamine saavutatakse korrektsioonimootorite ergutusmähiste järjestikuse sisselülitamisega 3 Ja 10 güromootori staatori mähistega. Lisaks on sisemisel raamil 7 mehaaniline pendel, mis, kui seadet ei ole sisse lülitatud, hoiab raamisüsteemi ligikaudu nullis.
positsiooni Samal eesmärgil kasutatakse mehaanilist lukku, kui vajutate nuppu 15 millele (vt joon. 4.10) paigaldatakse lisajälgijaraam nullasendisse. Nupp ütleb "Enne käivitamist vajutage". Asendinäidiku pöördevea vähendamiseks põiki korrigeeriv mootor 3 pöördel lülitatakse see välja korrektsioonilüliti VK-53RB abil. Seadme esiküljel allosas on libisemisnäidik 13 ja vasakul - käepide 14 lennuki silueti asukoha muutmiseks.
AIR HORIZON AGD-1
AGD-1 kaugasendinäidik annab meeskonnale hõlpsasti tajutava suuremahulise ülevaate õhusõiduki asukohast tegeliku horisondi tasapinna suhtes ja
 annab tarbijatele (autopiloot, kursisüsteem, radarijaamad) elektrilisi signaale, mis on proportsionaalsed lennuki kalde- ja kaldekõrvale.
annab tarbijatele (autopiloot, kursisüsteem, radarijaamad) elektrilisi signaale, mis on proportsionaalsed lennuki kalde- ja kaldekõrvale.
AGD-1 koosneb kahest seadmest: 1) pendli korrektsiooniga kolmekraadisest güroskoopist, mida nimetatakse gürosenduriks ja mis paigaldatakse lennuki raskuskeskmele võimalikult lähedale; 2) näidikud, mis on paigutatud meeskonna armatuurlauale. Ühe gürosenduriga saab ühendada kuni kolm indikaatorit.
AGD-1 skemaatiline elektromehaaniline diagramm on näidatud joonisel fig. 4.12, on näidatud kursori skaala vaade joonisel fig. 4.13

Joonis 4.13 AGD-1 asendinäidiku esikülg.
36-luku nupp, 37-lamp, muud tähistused on samad, mis 4.12.
Gürosendur on kolmekraadine güroskoop, mille välise kardaanraami telg on paigaldatud jälgimisraami 7. Jälgimisraami eesmärk on tagada seadme rullumine piiramatus nurkade vahemikus. Jälgijaraam 7 tagab, et güroskoopi enda pöörlemistelg on induktsiooniandmete abil risti vedrustuse välisraami teljega
chica 3 ja mootor-generaator 2, võimendi juhitav 1 . Ankur 5 andur on fikseeritud sisemise raami teljele ja staatorile 3 jäigalt ühendatud välisraamiga 8 kardaani vedrustus.
Lüliti 4 muudab mootori pöörlemissuunda 2, kui õhusõiduk teostab kaldemuutusi nurkade all, mis on suuremad kui 90°. Seega täidab jälgimisraam 7 samu funktsioone nagu AGI-1 asendiindikaator.
Kaadri 7 veerejälgimissüsteemi eripäraks AGD-1 asendiindikaatoris on pooljuhtelementidel põhineva võimendi ja mootori generaatori kasutamine. Pendli korrektsioon AGD-1 sarnaneb AGI-lc ja AGB-2 korrektsiooniga, kuid erineb selle poolest, et põiki parandusmootor 6 saab välja lülitada mitte ainult lülitiga 17, mida juhib paranduslüliti VK-53RB, aga ka spetsiaalne lamellseade (ei ole joonisel näidatud) 8-10° rullides. Lisaks pikisuunalise korrektsiooni mootor 10 juhitakse elektrolüütilise pendliga 13 vedeliku kiirendusmõõturi kaudu 16. See on vedelpendliga sarnane seade. Lennuki pikisuunalise kiirenduse ajal nihkub juhtiv vedelik inertsiaalsete jõudude mõjul ühele kontaktile ja ahela elektritakistuse suurenemise tõttu nõrgeneb korrektsioon 50%.
Lennuki kalde ja kalde kõrvalekaldeid mõõdetakse güroskoopsensoriga ja need edastatakse kursorile kahe identse jälgimissüsteemi abil:
1) veerejälgimissüsteem, mis koosneb sünkroandurist 9, sünkronisaator-vastuvõtja 20, võimendi 18 ja mootor-generaator 19;
2) helikõrguse jälgimise süsteem, mis sisaldab: sünkroandurit 14, selsyn-vastuvõtja 23, võimendi 24, mootor-generaator 25.

Lüliti 15 on lisatud kalde jälgimise süsteemi selle õigeks tööks rohkem kui 90° nurga all. AGD-1 jälgimissüsteemide eripäraks on mootorigeneraatorite kasutamine täiturmehhanismidena. Mootorgeneraator on elektrimasin, mis koosneb samale võllile paigaldatud mootorist ja generaatorist. Generaatoris tekkiv pinge on võrdeline mootori pöörlemiskiirusega. Servosüsteemis toimib see kiire tagasiside signaalina süsteemi võnkumiste summutamiseks. Mootori generaator 19 keerab käiku 21 lennuki siluetiga 22 seadme korpuse ja mootori generaatori suhtes 25 pöörab helikõrguse ketast 26,
millel on kahevärviline värv: horisondi kohal - sinine, allpool - pruun. Seega näitavad näidud lennuki liikuva silueti ja liikuva helikõrguse skaala järgi.
Lennuki asukoha tähis horisondi suhtes AGD-1-s on loomulik, st see vastab pildile, mida meeskond lennuki asukohast maapinna suhtes ette kujutab. Ligikaudne rullinäit on võimalik mõõteriista korpusel ja lennuki siluetil oleva digiteeritud fikseeritud skaalaga; skaalal 26 ja lennuki siluett on ligikaudselt määratud kaldenurkade järgi. AGD-1 kalde ja kalde indikaator on näidatud joonisel fig. 4.11. Meie arvates on AGD-1-s lennuki asukoha määramine mugavam kui AGB-2-s ja AGI-1-s.
AGD-1 hoiakuindikaator kasutab spetsiaalset seadet, mida nimetatakse piirajaks, mis võimaldab kiiresti viia seadme raam ja güromootor seadme korpuse ja sellest tulenevalt ka lennuki suhtes rangelt määratletud asendisse. Elektromehaanilise kauglukustusseadme AGD-1 kinemaatiline diagramm on näidatud joonisel fig. 4.14.
Seade töötab järgmiselt. Kui vajutate punast nuppu 36 (vt joonis 4.13), mis asub indikaatori esiküljel, annab mootorile pinge 34 (vt joon. 4.14. mis pöörledes paneb varda edasi liikuma 33 kasutades sõrme, mis liigub mööda kruvipilu, st pöörlev mutter on paigal ja kruvi liigub. Varud 33 video kaudu 32 toetub täiendavale tugiraamile 7, millel on kiilukujuline rõngas 35.
Tänu sellele rõnga profiilile, kui varda küljelt on raamile surve, siis rõngas 35 koos güroskoopiga pöörleb ümber raami 7 telje kuni rullikuni 32 ei asu rõnga alumises asendis. Sel juhul on raami 7 tasapind paralleelne lennukitiibade tasapinnaga. Järgmine laos 33 liigutab profiiliriba 31, mis toetub rusikale 30 ja loob hetke ümber välimise raami telje 8. Selle hetke mõjul pretsesseerub güroskoop ümber sisemise raami telje ja jõuab peatuseni, mille järel pretsessioon peatub ja güroskoop hakkab pöörlema ümber välimise raami telje kuni varda eendini. 31 ei mahu nuki väljalõikesse 30, kinnitades seega raami 8 asendis, kus sisemise raami telg on paralleelne lennuki pikiteljega.
Samal ajal sõrm 28, toetub vastu nukki 27, paigaldab sisemise raami 12 asendisse, kus güroskoobi enda pöörlemistelg on risti kardaani välise ja sisemise raami telgedega. Siis varras 33 selles sisalduva tagasitõmbevedru toimel kaldub see algsesse asendisse ja lubab varda 31 vabastage nukid 27 Ja 30.
Seega vabastab piiraja, olles paigaldanud güroskoopi raamid teatud asendisse, need koheselt lahti. Kui kinnipidamine toimub maapinnal lennuki horisontaalses asendis või horisontaallennul, siis seatakse güroskoopi enda pöörlemistelg vertikaalasendi suunas. Lukustamine peaks toimuma ainult horisontaallennul, nagu meeskonnale tuletab meelde kiri nupul 36 "Püüdke horisontaallennul."
Kui sooritate peatamist, näiteks veeremise ajal, siis tasapinnalisele lennule üleminekul näitab asendinäidik valeviset. Tõsi, pendli korrigeerimise mõjul seatakse güroskoobi enda telg vertikaalasendisse ja loomulikult kaovad ka valed näidud, kuid see võtab piisavalt aega, et meeskonnal piloteerimisel vigu teha. Tuleb märkida, et elektriline lukustusahel on konstrueeritud nii, et AGD-1 pinge all sisselülitamisel toimub lukustamine automaatselt, ilma nuppu vajutamata. Uuesti arreteerimisel, näiteks AGD-1 ajutise voolukatkestuse ajal, vajutades nuppu 36 kohustuslik, kuid ainult horisontaallennu ajal.
Indikaatori esiküljel on hoiatustuli 37 (vt. joon. 4.13), mis süttib esiteks seiskamisprotsessi toimumisel ja teiseks güromootori ja alalisvoolu ±27 V toiteahelate rikete korral.
AIR HORIZONT AGB-3 (AGB-Zk)
AGB-3 asendinäidiku põhieesmärk on anda meeskonnale hõlpsasti tajutav suuremahuline teave lennuki või helikopteri asukohast tegeliku horisondi tasapinna suhtes kalde- ja kaldenurgas. Lisaks võimaldab asendinäidik väljastada lennuki ja helikopteri välistarbijatele (autopiloot, kursisüsteem jne) kalde- ja kaldenurkadega proportsionaalseid elektrilisi signaale.

Asendiindikaator AGB-Zk on asendiindikaatori AGB-3 modifikatsioon. See erineb ainult sisseehitatud punaste valgustite olemasolust, mis valgustavad seadme esiosa ja elementide värvi: näit.
AGB-3 asendiindikaatori elektromehaaniline skeem on näidatud joonisel fig. 4.15, elektriskeem - joonisel fig. 4.16 ja selle skaala vaade on joonisel fig. 4.17. Güroskoobi enda telg viiakse vertikaalasendisse pendli korrektsioonisüsteemiga, mis sisaldab kahte elektrolüütilist pendlit 20 Ja 21, parandusmootorite juhtimine 7 ja 9. AGB-3 kasutab ühekoordinaatseid: elektrolüütilisi pendleid, mis töötavad samal põhimõttel nagu kahekoordinaatsed, mida kasutatakse AGB-2, AGI-lc ja AGD-1 puhul. Üheteljelisel pendlil on kolm kontakti ja see reageerib kallutustele ainult ühes suunas. Külgmise korrektsiooni ahelas on kontakt 16 paranduslüliti VK-53RB, mis katkestab vooluringi, kui lennuk teeb pöördeid, vähendades sellega pöördeviga.

Seadme töövalmidusaeg asendinäidikus väheneb mehaanilise piiriku abil (joonis 4.15 seda pole näidatud). Kui lennuk on horisontaalses asendis, seab peataja güroskoobi raamid algseisundisse, milles güroskoobi peatelg langeb kokku vertikaalasendiga. Piirajat kasutatakse enne seadme käivitamist, kui ühel või teisel põhjusel on vaja seadme raam kiiresti algsesse asendisse viia. AGB-3 lukk on tõuketüüpi, st selle toimimiseks tuleb vajutada nuppu 26 (vt joonis 4.17) kuni rikkeni. Nupu vabastamisel vabastatakse raamid automaatselt lukust.
Piiritusseadme töö on sarnane AGD-1 asendinäidiku piduri tööga. AGB-3 asendi indikaatoril on mehaaniline piirik.
Tarbijatele signaalide edastamiseks lennuki läbipainde kohta veeres ja kaldenurgas on kardaani välisraami teljele paigaldatud sünteetiline andur. 14 (vt joon. 4.15, 4.16) ning siseraami teljel on sünteetiline andur 15.
Lennukis on asendinäidik paigaldatud nii, et telg
välimine raam 8
(vt. joon. 4.15) on suunatud paralleelselt lennuki pikiteljega. See tagab seadme töötamise 360° pöördevahemikus.

Kardaani siseraami telg on algmomendil paralleelne lennuki põikteljega. Kuna täiendav
Kuna AGB-3-l pole jälgimisraami, nagu AGI-lc ja AGD-1, on selle asendi indikaatori töösammu vahemik piiratud ±80° nurkadega. Tõepoolest, kui tasapinna kaldenurk on 90°, joondub välise raami telg güroskoobi enda pöörlemisteljega. Ühe vabadusastme kaotanud güroskoop muutub ebastabiilseks. Kuid selleks, et anda meeskonnale õige ülevaade õhusõiduki asukohast horisondi tasapinna suhtes ümberpööratud olekus (näiteks "Nesterovi silmuse" joonise tegemisel), kasutatakse seadmes peatusi. 10 Ja 11 (vt joonis 4.15). Keerukate evolutsioonide sooritamisel lennukis, mille kaldenurk on üle 80°, peatus 10, asub välisraamil, hakkab suruma vastu stoppert 11, kinnitatud sisemise raami teljele. See loob hetke ümber sisemise raami telje. Pretsessiooniseaduse kohaselt güroskoop selle hetke mõjul pretsesseerib, st pöörleb ümber välise raami telje, püüdes oma pöörlemistelge joondada hetke rakendusteljega üle kõige lühema. vahemaa. Seega on väline kardaanraam all. Kaal pöörleb 180°. Kui kaldenurk on üle 90°, peatuge 11 liigub peatusest eemale 10, pretsessioon peatub ja lennuki siluett 4 pööratakse 180° kõrguse skaala suhtes 3, mis näitab õhusõiduki ümberpööratud asendit 180 võrra horisontaaltasapinna suhtes.

Lennuki asukoha märkimine horisondi tasapinna suhtes AGB-3-s toimub järgmiselt. Veeremise ajal pöörleb seadme korpus koos lennukiga ümber välimise raami telje pöördenurga võrra, kuna güroskoobi enda pöörlemistelg hoiab vertikaalset suunda. Lennuki siluett 4 Samal ajal osaleb see kahes liikumises: 1) kaasaskantav - koos seadme korpusega kaldenurgani juures(joon. 4.18) ja 2) pöörlev (hõim 6 veeretab trib 5) liikumatult veeres sama nurga alla Y. Nende kahe liikumise tulemusena pöörleb lennuki siluett ruumis läbi lennuki kahekordse kaldenurga. Meeskond jälgib kaldenurka lennuki silueti liikumise põhjal 4 mastaabi suhtes 3. Sel juhul pöördub siluett loomuliku kaldenurga alla lennukiga samas suunas.
Kaldenurki saab umbkaudselt mõõta skaala abil 27 instrumendi korpusel ja kaldenurgad - skaalal 3 ja lennuki siluett 4. Kõrgusskaala järgib lennuki kaldenurki tänu jälgimissüsteemile, mis sisaldab sünkroniseerimisandurit 15, asub kardaani vedrustuse siseteljel, sünkroniseerija vastuvõtja 19, võimendi 17 ja mootor-generaator 18. Skaala pilus.3 on telg, millele on kinnitatud lennuki siluett.
Seega on AGB-3 veere ja kalde näidud loomulikud ja identsed AGD-1 näitudega (vt joonis 4.11).
AGB-3-l on seadme toiteahelates rikkesignalisatsiooniahel, mis sisaldab järgmisi elemente: voolukatkestuse mootor 1 koos märkeruuduga 2 (vt. joon. 4.15 ja 4.16) ja kaks releed 22 Ja 23. Mootori mähised 1 ühendatud güromootori staatori mähistega järjestikku 13. Kui 36 V vahelduvvooluahelad on heas töökorras, liiguvad güromootori ja sünkroonandurite voolud läbi mootori mähiste 14 Ja 15.
Selle tulemusena tekib mootori võllile pöördemoment 1, mille mõjul märkeruut 2 Mootori võllile paigaldatud signaalseade eemaldatakse seadme esiosa nähtavalt alalt.
Kui güromootori toiteahelas pole vahelduvpinget või tekib faasikadu, siis mootori pöördemoment langeb järsult ja vedru mõjul visatakse lipp auto esiosa nähtavale alale. seade.
Relee 22 Ja 23 on ühendatud paralleelselt helikõrguse jälgimise süsteemi võimendi toiteahelaga. 27 V alalispinge puudumisel kontaktid 24 Ja 25 need releed sulguvad, manööverdades mootori 1 mähiste kahte faasi, mistõttu selle pöördemoment väheneb ja vedru heidab lipu 2, mis annab märku voolukatkestusest.
Seega saab avatud vooluahela pingega 36 V, sagedusega 400 Hz või vooluringis pingega 27 V, samuti ühe seda tüüpi toiteallika puudumist määrata indikaatorlipu olemasolu instrumendi skaala vaateväljas.
AVIAHORIZONT AGK-47B
Asendinäidik on kombineeritud, kuna ühte korpusesse on paigaldatud kolm instrumenti: asendinäidik, suunanäidik ja libisemisnäidik.
Asendinäidiku eesmärk on anda meeskonnale teavet lennuki asukoha kohta horisondi tasapinna suhtes. Pöördeindikaatorit kasutatakse lennuki pöörlemissuuna määramiseks ja libisemisnäidik mõõdab libisemist. Suunatulest on juttu jaotises. 4.2 ja libisemisnäidik - jaotises. 3.11. Lihtsustatud kinemaatilised, elektrilised diagrammid ja asendinäidiku esikülg on esitatud joonisel fig. 4,19, 4,20, 4,21; Kõik joonistel olevad sümbolid on samad.

Güroskoobi 7 (vt joonis 4.19, 4.20) enda pöörlemistelg viiakse vertikaalasendisse pendli korrektsioonisüsteemi abil, mis sisaldab elektrolüütilist pendlit, /6 ja kahte solenoidi. 13 Ja 14, Solenoid 13 asub välisteljega risti juures kardaanvedrustus ja solenoid 14 - siseteljega risti X siseraamil kardaanvedrustus 6, valmistatud korpuse kujul. Igal solenoidil on kaks mähist, mis tekitavad voolude läbimisel vastassuunalised magnetväljad. Solenoididel on metallsüdamikud, mis on võimelised solenoidides liikuma. Kui güroskoobi enda pöörlemistelg ühtib lokaalse vertikaali suunaga, siis elektrolüütilisest pendlist laekuvad samad signaalid solenoidi mähistele ja südamikud, olles keskmises asendis, ei tekita momente ümber kardaanitelgede. Kui güroskoobi peatelg kaldub vertikaalsuunast kõrvale, ei ole elektrolüütilise pendli kontaktide ebavõrdse takistuse tõttu solenoidide mähiste kaudu voolavad voolud võrdsed. See viib südamike liikumiseni solenoidides ja nende raskuse tõttu kardaani telgede ümber tekivad momendid, mis viivad güroskoobi enda pöörlemistelje vertikaalasendisse. Nii et solenoid 14 osaleb pöördemomendi loomises ümber kardaani sisetelje ja solenoidi 13 - ümber vedrustuse välistelje.

Asendinäidiku kardaani välistelg on paralleelne lennuki põikteljega, seega on samm näidatud ringikujulisel skaalal 4, mis on seotud kardaani 5 välise raamiga ja seadme korpusega seotud horisondi joonega. Sukeldumisel või tõusmisel horisondi joon liigub fikseeritud skaala suhtes – piloot näeb vastupidist pilti: lennuki siluetti 1 koos skaalaga 4 langeb või tõuseb horisondijoone suhtes. Veeremisnäit toimub õhusõiduki silueti suhtelise asukoha / kardaani sisemise raamiga seotud asukoha ja skaala järgi 3, paigaldatud välisele kardaanraamile. Selleks, et veeremisnäit oleks loomulik, st lennuki siluett simuleerib veeremist horisondi tasapinna suhtes, nagu ka AGB-3 puhul, kasutab AGK.-47B käigupaari ülekandearvuga 1:1. Kalde skaala on tähistatud 20° intervalliga ja kalde skaala on märgitud 15° intervalliga. AGK-47B kalde- ja kaldenäit lennuki arengu ajal on näidatud joonisel fig. 4.11.

Asendinäidikul on fikseeritud tüüpi mehaaniline lukk, st kui AGB-3 ja AGD-1 puhul töötab lukk ainult nupu vajutamisel, siis AGK-47B puhul on see võimalik lukuvarda pikendamisega 20 (Joonis 4.21) enda poole, fikseerige see selles asendis. Kui seade on lukus, ilmub seadme esiküljele punane lipp kirjaga “Lukustatud”. Kui seade on lukustatud, langeb güroskoobi enda pöörlemistelg kokku lennuki vertikaalteljega ja teljed juures ja x ühtivad vastavalt õhusõiduki piki- ja põikteljega. Luku juhtkäepidemel on kirjutatud “Tõmba lukk”.
Põrkmehhanismi kasutamine 22 Teatud piirides on võimalik muuta tehishorisondi joone asendit instrumendi korpuse suhtes, mida on mõnikord soovitav teha kalde lennutrajektoori säilitamise mugavuse huvides pika mittehorisontaalse lennu ajal.
Nagu iga asendinäidik, esineb ka AGK-47B-l pöördeviga, kuid kuna see on ette nähtud paigaldamiseks kerge mootoriga lennukitele, kus paranduslülitit ei pruugi olla, ei saa selles korrektsiooni välja lülitada. . Samal ajal on seade vasakpöördel tekkivate vigade vähendamiseks konstrueeritud nii, et tema enda pöörlemistelje tavaasend on selle kallutatud asend piki lendu 2° võrra edasi. Vea vähenemine just vasakpöörde puhul on ilmselt seletatav sellega, et lennukid teevad sagedamini vasakpööret, kuna piloot istub vasakpoolsel istmel kokpitis. Tõepoolest, vasakpöörde ajal näitab elektrolüütipendel näivat vertikaali, mis kaldub pöörde sees nurga all
kus ω on pöörde nurkkiirus; V- lennuki lennukiirus; g- gravitatsiooni kiirendus.
Külgmise korrektsioonisüsteemi mõjul solenoidi abil 13 güroskoop hakkab kiirusega pretsesseerima näiva vertikaali suunas

Samal ajal pöörleb güroskoobi enda pöörlemistelje ots pöörlemisel kiirusega ümber tõelise vertikaali asendi
![]() (4.5)
(4.5)
kus α 0 on güroskoobi enda pöörlemistelje esialgne kaldenurk (joonis 4.22), mis on suunatud vastupidises suunas, kuna güroskoobi eesmärk on säilitada oma pöörlemistelje asend ruumis muutumatuna . Kiiruse ω γ suund on vastupidine güroskoobi pretsessioonikiiruse β suunale.

Ilmselgelt, et vasakpöördel viga ei tekiks, peab tingimus olema täidetud
või väikeste nurkade puhul saab kirjutada β 0 (4.6).
![]() (4.7)
(4.7)
![]() (4.8)
(4.8)
Teades K y asendinäidik ja kõige levinumad pöördekiirused, saate määrata güroskoobi telje vajaliku kaldenurga α 0.
AIR HORIZONT AGR-144
AGR-144 asendinäidik on kombineeritud instrument; See sisaldab kolme instrumenti: asendinäidik, pöördenäidik ja libisemisnäidik.
Asendinäidiku eesmärk on anda meeskonnale teavet õhusõiduki asukoha kohta horisondi tasapinna suhtes Suunanäidiku abil määratakse lennuki pöörde olemasolu ja suund ümber oma vertikaaltelje. Libisemise indikaator mõõdab lennuki libisemist. Lisaks, kui kooskõlastatakse
Üks peamisi omadusi, mis määrab laeva merekõlblikkuse, on selle stabiilsus. Jahi hea stabiilsus on eelkõige garantii tugeva mere tingimustes. Laevale paigaldatud ala sõltub ka stabiilsusest, mis määrab suuresti selle kiiruse. Mõiste "püsivus" tähendab ise laeva võimet veeremisele vastu seista. Selles artiklis käsitleme seda nähtust üksikasjalikumalt - laeva rull.
Laeva veeremise põhjused
Meredistsipliinis on määratletud kui laevakere diametraaltasandi kõrvalekalle vertikaalist, mis on tavapäraselt tõmmatud veepinnale. Lihtsamalt ja arusaadavamalt öeldes on veeremine mis tahes laevakere tavapärase tasapinna kõrvalekalle horisontaalasendist. Sellel võib olla mitu põhjust:
- Lainete mõju laeva kerele, kui vastutulevate lainete mõjul hakkab laev kõikuma ja külili kalduma.
- Tuule mõju jahi purjedele. Tugeva tuule järsud puhangud võivad viia üsna suure kreeni moodustumiseni, põhjustades sageli purjeka ümbermineku.
- Lasti vale paigutamine laeva trümmi või selle eemaldamine kinnitustest õõtsumise ajal.
- Tsentrifugaaljõudude toime, kui jaht siseneb järsule pöördele.
Laeva kaldenurk mõõdetuna kraadides, mis näitab selle kere horisontaalse asendi kõrvalekalde astet merepinna tavapärasest horisondist. Lisaks saab laeva veeremise määrata ka tüürpoordi ja pakipordi süvise erinevuse järgi. Kui vasakpoolne süvis on suurem, nimetatakse seda kere asendit " veerema sadamasse" Kui laeva süvis on rohkem tüürpoordi poole, määratletakse olukord kui "kaldenurk paremale küljele".
Laevarulli tüübid
Sõltuvalt põhjustest, mis põhjustavad , seda võib olla mitut tüüpi. Nende hulka kuuluvad järgmised tüübid.
Dünaamiline
Kõikidest rullitüüpidest kõige tavalisem, millega iga jahimees avamerele minnes silmitsi seisab. See tekib teatud väliste lühiajaliste jõudude mõjul. Tavaliselt on sellisteks jõududeks teravad tuuleiilid või küljele löövad lained. Dünaamiline veeremine nõuab selle esinemise lühikese hetke tõttu harva jahimehe sekkumist. Täpsemalt öeldes pole meeskonnal enamasti lihtsalt aega konkreetsete toimingute tegemiseks tekkinud dünaamilise veeremise kõrvaldamiseks.
Selle tulemusel laev kas isetasandub tänu selle konstruktsiooni sisseehitatud stabiilsusreservile või jääb külili. Laeva võime taluda lühiajalist dünaamilist veeremist määrab selle püstuvusomadused. Millal iganes jahtrull välisjõu mõjul tekivad koheselt vastassuunalised tasandusjõud, mis kipuvad viima laeva algsesse asendisse.
Staatiline
Nimetatakse staatiliseks , mis tekkis mingi staatilise, st konstantse suurusjärgu jõu mõjul. Staatilise veeremise põhjuseks on laeva raskuskeskme nihkumine ahtri/vööri või ühele küljele. Tavaliselt on selle põhjuseks koormuse vale joondamine või selle nihkumine kinnituste purunemise tagajärjel. Lisaks võib aluse staatilise kreeni põhjuseks olla vee sattumine laevakere augu tagajärjel. Sellises olukorras on laev kreenis ka siis, kui puudub väline mõju lainete või tuule näol. Staatiline veeremine on defineeritud kui laeva negatiivne algstabiilsus, mis välisjõudude täiendava mõjuga võib suure tõenäosusega viia selle ümberminekuni.

Pikisuunaline
Pikisuunaline rull Laeva trimm on selle ahtri ja vööri süvise tasakaalustamatus. Kui ahtri süvis on suurem kui vööri süvis, on tegemist ahtri trimmiga, kui vastupidi, siis vööri trimmiga. Laeva pikisuunaline rull mõjutab oluliselt jahi merekindlust. Väikestel jahtidel, mille kere pikkus on alla 10 m, loetakse maksimaalseks lubatud trimmiks süvise erinevust 5 cm. Suurem ahtri süvis vähendab paadi kiirust, kuna liigselt vee all olev ahter suurendab vastupanujõudu veemassist liikumisele.
Pikisuunaline rullimine suurendab liikuva laeva suuna stabiilsust. Sellega seoses kuuletub jaht roolile kehvemini, kui on vaja kurssi muuta. Lisaks põhjustab ahtri trimmimine paati tuulde kukkumise. Paatidel, mille peamine liikumisviis on hööveldamine, raskendab ahtri trimm stabiilsele libisemisele jõudmist. Niinimetatud delfiiniefekti täheldatakse siis, kui laeva vöör visatakse perioodiliselt üles ja seejärel sukeldub alla.
Pikisuunaline vöörini trimmimine toob kaasa ka kiiruse olulise vähenemise, kuna vööri “kaevab” lainetesse, mis suurendab liikumisel takistust. Vööris trimmitud jaht muutub viltu, liiga "reageerib" väikseimagi tüüri asendi muutusele ja hoiab oma kurssi halvemini. See on eriti ilmne laine suhtes nurga all liikudes. Veetakistuse suurenemine hööveldavatel paatidel tekitab probleeme ka kiiruse vähenemise tõttu glissaadile jõudmisel. Kõiki neid probleeme saab vältida, kui asetada koorem või ballast õigesti kere sisse.
Ringlus
Ringlusrull on veeremine, mis tekib siis, kui laev siseneb pöördesse. Ringlusrulli suurus sõltub laeva manööverduskiirusest ja pöörde kõverusraadiusest. Pöörde sisenemisel veerevad veeväljasurveanumad väljapoole. Höövelduspaadid kalduvad oma liikumise dünaamiliste omaduste tõttu, vastupidi, pöörderaadiuse sees.
Rooli liiga järsk nihutamine madala stabiilsusega laevadel võib viia laeva ümberminekuni. Lisaks võivad reisijad ja meeskonnaliikmed, kes pole manöövriks ette valmistatud, sattuda äkilise kreeni tõttu lukku. Seetõttu peaks tüürimees enne kurvi sisenemist ette nägema jahi ümbermineku ohtu ning hoiatama ka pardal olijaid eelseisva manöövri eest.
Laeva veeremise vältimine
Nagu näete, on kreenimine üsna ebameeldiv nähtus, mis võib kaasa tuua üsna tõsiseid tagajärgi - inimesed kukuvad üle parda või isegi laeva ümberminek. Muide, riigipööre on võimalik mitte ainult pardal. Mereajaloos on olnud juhtumeid, kus laevad on täiskiirusel läbi vööri ümber läinud – nii hukkus 1866. aasta teeralli võitja kuulus klipper Ariel.
Kreenimise vältimiseks ja selle vastu võitlemiseks paigaldatakse suurtele laevadele terved tasandussüsteemid. Nende hulka kuuluvad veepaagid, pumbad ja suruõhusilindrid, kingstonid ja nii edasi. Sellised veeremisvastased süsteemid on osa laeva üldisest vastupidavuse vastu võitlemise süsteemist ja võimaldavad sellest tulenevaid veeresid ja trimme tasandada.

Rullinurk määratakse spetsiaalse seadmega - inklinomeetriga. Paigaldatakse laeva sillale või jahi lootsimajja. Tavaliselt on kahte tüüpi:
- Kraadijaotusega sektori külge kinnitatud loodijoon.
- Vedelik, mis põhineb õhumullide liikumisel vedelikus.
Veerekindlus, selle kriitiliste näitude suurendamine, on laevakonstruktorite peamine ülesanne. Tänapäeval kehtivad paljudele tootmisjahtidele lisaks muudele tehnilistele nõuetele ka stabiilsusstandardid. Kruiisijahtide puhul on see näitaja umbes 110-115 o. Kui teil on jaht, kuid te ei tea selle võimet ümberminekule vastu pidada, on soovitatav läbi viia eksperimentaalne kaldekatse. Kalda lähedal asuv paat on kunstlikult kallutatud, kuni see kukub külili. Nii saadakse andmeid jahi võime kohta taluda erineva suurusega veeremist.