Määrake kaugus tasapinnast lähtepunktini. Kaugus punktist tasapinnani: määratlus ja leidmise näited. Kaugus punktist tasapinnani – teooria, näited, lahendused
Käesolevas artiklis defineerime kauguse punktist tasapinnani ja analüüsime koordinaatide meetodit, mis võimaldab leida kauguse antud punktist antud tasandini kolmemõõtmelises ruumis. Pärast teooria tutvustamist analüüsime üksikasjalikult mitmete tüüpiliste näidete ja probleemide lahendusi.
Leheküljel navigeerimine.
Kaugus punktist tasapinnani on määratlus.
Kaugus punktist tasapinnani määratakse läbi , millest üks on antud punkt ja teine on antud punkti projektsioon antud tasapinnale.
Olgu kolmemõõtmelises ruumis antud punkt M 1 ja tasapind. Joonistame tasapinnaga risti oleva sirge a läbi punkti M 1. Tähistame sirge a ja tasandi lõikepunkti kui H 1 . Lõigu M 1 H 1 nimetatakse risti, langetatud punktist M 1 tasapinnale ja punkt H 1 - risti alus.
Definitsioon.
on kaugus antud punktist antud punktist antud tasapinnaga tõmmatud risti aluseni.
Punkti ja tasapinna kauguse määratlus on tavalisem järgmisel kujul.
Definitsioon.
Kaugus punktist tasapinnani on antud punktist antud tasapinnale langetatud risti pikkus.

Tuleb märkida, et sel viisil määratud kaugus punktist M 1 tasapinnani on väikseim kaugustest antud punktist M 1 tasandi mis tahes punktini. Tõepoolest, punkt H 2 asub tasapinnal ja erineb punktist H 1 . Ilmselt on kolmnurk M 2 H 1 H 2 ristkülikukujuline, selles on M 1 H 1 jalg ja M 1 H 2 on hüpotenuus, seega ![]() . Muide, segmenti M 1 H 2 nimetatakse kaldus tõmmatud punktist M 1 tasapinnale. Seega on antud punktist antud tasapinnale langetatud risti alati väiksem kui samast punktist antud tasapinnale tõmmatud kaldnurk.
. Muide, segmenti M 1 H 2 nimetatakse kaldus tõmmatud punktist M 1 tasapinnale. Seega on antud punktist antud tasapinnale langetatud risti alati väiksem kui samast punktist antud tasapinnale tõmmatud kaldnurk.

Kaugus punktist tasapinnani – teooria, näited, lahendused.
Mõned geomeetrilised ülesanded nõuavad lahenduse mõnes etapis punkti ja tasapinna kauguse leidmist. Selle meetod valitakse sõltuvalt lähteandmetest. Tavaliselt on tulemuseks kas Pythagorase teoreemi või kolmnurkade võrdsuse ja sarnasuse märkide kasutamine. Kui on vaja leida kaugus punktist tasapinnani, mis on antud kolmemõõtmelises ruumis, siis tuleb appi koordinaatide meetod. Artikli selles lõigus analüüsime seda lihtsalt.
Esiteks sõnastame probleemi olukorra.
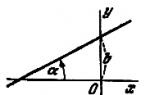
Ristkülikukujulises koordinaatsüsteemis Oxyz kolmemõõtmelises ruumis on punkt antud ![]() , tasapind ja selleks on vaja leida kaugus punktist M 1 tasapinnani.
, tasapind ja selleks on vaja leida kaugus punktist M 1 tasapinnani.
Vaatame selle probleemi lahendamiseks kahte võimalust. Esimene meetod, mis võimaldab arvutada kaugust punktist tasapinnani, põhineb punkti H 1 koordinaatide leidmisel - punktist M 1 tasapinnale langenud risti aluse ja seejärel kauguse arvutamisel. punktide M 1 ja H 1 vahel. Teine viis antud punkti ja antud tasapinna kauguse leidmiseks hõlmab antud tasandi normaalvõrrandi kasutamist.
Esimene viis punktist kauguse arvutamiseks  lennukile.
lennukile.
Olgu H 1 punktist M 1 tasapinnale tõmmatud risti alus. Kui määrata punkti H 1 koordinaadid, saab punktide vahelise kaugusena arvutada vajaliku kauguse punktist M 1 tasapinnani. ![]() ja
ja ![]() valemi järgi. Seega jääb üle leida punkti H 1 koordinaadid.
valemi järgi. Seega jääb üle leida punkti H 1 koordinaadid.
Niisiis, Algoritm punktist kauguse leidmiseks ![]() kuni lennukini järgmine:
kuni lennukini järgmine:
Teine meetod, mis sobib punktist kauguse leidmiseks lennukile.
Kuna meile on antud tasapind ristkülikukujulises koordinaatsüsteemis Oxyz, saame tasandi normaalvõrrandi kujul. Siis kaugus punktist ![]() tasapinnale arvutatakse valemiga . Selle valemi kehtivus punktist tasapinnani kauguse leidmiseks määratakse järgmise teoreemiga.
tasapinnale arvutatakse valemiga . Selle valemi kehtivus punktist tasapinnani kauguse leidmiseks määratakse järgmise teoreemiga.
Teoreem.
Olgu ristkülikukujuline koordinaatsüsteem Oxyz fikseeritud kolmemõõtmelises ruumis, punktis ![]() ja vormi tasandi normaalvõrrand . Kaugus punktist M 1 tasapinnani on võrdne tasapinna normaalvõrrandi vasakul küljel oleva avaldise väärtuse absoluutväärtusega, mis on arvutatud , see tähendab .
ja vormi tasandi normaalvõrrand . Kaugus punktist M 1 tasapinnani on võrdne tasapinna normaalvõrrandi vasakul küljel oleva avaldise väärtuse absoluutväärtusega, mis on arvutatud , see tähendab .
Tõestus.
Selle teoreemi tõestus on absoluutselt sarnane sarnase teoreemi tõestusega, mis on antud jaotises Punkti ja sirge kauguse leidmine.
Lihtne on näidata, et kaugus punktist M 1 tasapinnani on võrdne arvprojektsiooni M 1 ja lähtepunktist tasapinna vahelise erinevuse mooduliga, st. ![]() , kus
, kus ![]() - tasapinna normaalvektor on võrdne ühega, -
- tasapinna normaalvektor on võrdne ühega, - ![]() vektori poolt määratud suunas .
vektori poolt määratud suunas .
![]() ja
ja ![]() definitsiooni järgi on , kuid koordinaatide kujul . Seetõttu ja nagu on vaja tõestada.
definitsiooni järgi on , kuid koordinaatide kujul . Seetõttu ja nagu on vaja tõestada.
Sellel viisil, kaugus punktist ![]() tasapinnale saab arvutada asendades tasandi normaalvõrrandi vasakpoolsesse serva punkti M 1 koordinaadid x 1 , y 1 ja z 1 x, y ja z asemel ning võttes saadud väärtuse absoluutväärtuse. .
tasapinnale saab arvutada asendades tasandi normaalvõrrandi vasakpoolsesse serva punkti M 1 koordinaadid x 1 , y 1 ja z 1 x, y ja z asemel ning võttes saadud väärtuse absoluutväärtuse. .
Näited punktist kauguse leidmiseks lennukile.
Näide.
Otsige kaugust punktist ![]() lennukile.
lennukile.
Lahendus.
Esimene viis.
Ülesande tingimuses on meile antud vormi tasandi üldvõrrand, millest on näha, et ![]() on selle tasandi normaalvektor. Seda vektorit võib võtta antud tasapinnaga risti oleva sirge a suunavektoriks. Siis saame kirjutada punkti läbiva ruumi sirge kanoonilised võrrandid
on selle tasandi normaalvektor. Seda vektorit võib võtta antud tasapinnaga risti oleva sirge a suunavektoriks. Siis saame kirjutada punkti läbiva ruumi sirge kanoonilised võrrandid ![]() ja sellel on koordinaatidega suunavektor, need näevad välja nagu .
ja sellel on koordinaatidega suunavektor, need näevad välja nagu .
Alustame sirge lõikepunkti koordinaatide leidmist ![]() ja lennukid. Tähistame seda H 1 . Selleks teostame esmalt ülemineku sirgjoone kanoonilistest võrranditest kahe lõikuva tasandi võrranditele:
ja lennukid. Tähistame seda H 1 . Selleks teostame esmalt ülemineku sirgjoone kanoonilistest võrranditest kahe lõikuva tasandi võrranditele: 
Nüüd lahendame võrrandisüsteemi  (vajadusel vaadake artiklit). Me kasutame:
(vajadusel vaadake artiklit). Me kasutame: 
Sellel viisil, .
Jääb üle arvutada punktidevaheliseks kauguseks vajalik kaugus antud punktist antud tasapinnani ![]() ja:
ja:
.
Teine lahendus.
Saame antud tasandi normaalvõrrandi. Selleks peame viima tasandi üldvõrrandi normaalkujule. Olles määranud normaliseeriva teguri  , saame tasapinna normaalvõrrandi
, saame tasapinna normaalvõrrandi  . Jääb üle arvutada saadud võrrandi vasaku külje väärtus
. Jääb üle arvutada saadud võrrandi vasaku külje väärtus ![]() ja võtke saadud väärtuse moodul - see annab soovitud kauguse punktist
ja võtke saadud väärtuse moodul - see annab soovitud kauguse punktist ![]() lennukisse:
lennukisse:
See artikkel räägib kauguse määramisest punktist tasapinnani. analüüsime koordinaatide meetodit, mis võimaldab leida kauguse antud punktist kolmemõõtmelises ruumis. Konsolideerimiseks kaaluge mitme ülesande näiteid.
Kaugus punktist tasapinnani leitakse teadaoleva kauguse abil punktist punktini, kus üks neist on antud ja teine on projektsioon antud tasapinnale.
Kui ruumis on antud punkt M 1 tasapinnaga χ, siis saab punktist läbi tõmmata tasapinnaga risti oleva sirge. H 1 on nende ühine ristumispunkt. Siit saame, et lõik M 1 H 1 on rist, mis tõmmati punktist M 1 tasapinnale χ, kus punkt H 1 on risti alus.
Definitsioon 1
Nad nimetavad kaugust antud punktist risti aluseni, mis tõmmati antud punktist antud tasapinnale.
Definitsiooni saab kirjutada erinevates vormides.
2. definitsioon
Kaugus punktist tasapinnani nimetatakse risti pikkuseks, mis tõmmati antud punktist antud tasapinnale.
Kaugus punktist M 1 tasapinnani χ on määratletud järgmiselt: kaugus punktist M 1 tasapinnani χ on väikseim antud punktist tasapinna mis tahes punktini. Kui punkt H 2 asub χ tasapinnal ja ei võrdu punktiga H 2, siis saame täisnurkse kolmnurga kujul M 2 H 1 H 2 , mis on ristkülikukujuline, kus on jalg M 2 H 1, M 2 H 2 - hüpotenuus. Seega tähendab see, et M 1 H 1< M 1 H 2 . Тогда отрезок М 2 H 1 loetakse kalduks, mis tõmmatakse punktist M 1 tasapinnale χ. Meil on, et antud punktist tasapinnale tõmmatud risti on väiksem kui punktist antud tasapinnale tõmmatud kaldnurk. Mõelge sellele juhtumile alloleval joonisel.

Kaugus punktist tasapinnani – teooria, näited, lahendused
On mitmeid geomeetrilisi ülesandeid, mille lahendused peavad sisaldama kaugust punktist tasapinnani. Selle tuvastamise viisid võivad olla erinevad. Lahenduseks kasutage Pythagorase teoreemi või kolmnurkade sarnasust. Kui vastavalt tingimusele on vaja arvutada kaugus punktist tasapinnani, mis on antud kolmemõõtmelise ruumi ristkülikukujulises koordinaatsüsteemis, lahendatakse need koordinaatide meetodil. See lõik käsitleb seda meetodit.
Vastavalt ülesande tingimusele on meil antud, et kolmemõõtmelises ruumis koordinaatidega M 1 (x 1, y 1, z 1) punkt tasapinnaga χ on antud, on vaja määrata kaugus M 1-st. tasapind χ. Lahendamiseks kasutatakse mitmeid lahendusi.
Esimene viis
See meetod põhineb kauguse leidmisel punktist tasapinnani, kasutades punkti H 1 koordinaate, mis on punktist M 1 tasandi χ vahelise risti alus. Järgmisena peate arvutama kauguse M 1 ja H 1 vahel.
Ülesande lahendamiseks teisel viisil kasutatakse antud tasandi normaalvõrrandit.
Teine viis
Tingimusel on, et H 1 on ristnurga alus, mis langetati punktist M 1 tasapinnale χ. Seejärel määrame punkti H 1 koordinaadid (x 2, y 2, z 2). Soovitud kaugus M 1 tasandist χ leitakse valemiga M 1 H 1 \u003d (x 2 - x 1) 2 + (y 2 - y 1) 2 + (z 2 - z 1) 2, kus M 1 (x 1, y 1, z 1) ja H 1 (x 2, y 2, z 2). Lahendamiseks peate teadma punkti H 1 koordinaate.
Meil on, et H 1 on tasandi χ lõikepunkt sirgega a, mis läbib tasandiga χ risti asuvat punkti M 1. Sellest järeldub, et on vaja sõnastada sirge võrrand, mis läbib antud punkti, mis on risti antud tasandiga. Just siis saame määrata punkti H 1 koordinaadid. On vaja arvutada sirge ja tasandi lõikepunkti koordinaadid.
Algoritm koordinaatidega punktist M 1 (x 1, y 1, z 1) χ tasandi kauguse leidmiseks:
3. definitsioon
- koostada võrrand sirgjoonest a, mis läbib punkti M 1 ja samal ajal
- risti χ tasapinnaga;
- leida ja arvutada punkti H 1 koordinaadid (x 2, y 2, z 2), mis on punktid
- sirge a lõikepunkt tasapinnaga χ ;
- arvutage kaugus M 1-st χ-ni, kasutades valemit M 1 H 1 = (x 2 - x 1) 2 + (y 2 - y 1) 2 + z 2 - z 1 2.
Kolmas viis
Antud ristkülikukujulises koordinaatsüsteemis O x y z on tasapind χ, siis saame tasapinna normaalvõrrandi kujul cos α · x + cos β · y + cos γ · z - p = 0 . Siit saame, et kaugus M 1 H 1 punktiga M 1 (x 1 , y 1 , z 1) tasapinnani χ, mis arvutatakse valemiga M 1 H 1 = cos α x + cos β y + cos γ z-p. See valem kehtib, kuna see on kindlaks tehtud tänu teoreemile.
Teoreem
Kui kolmemõõtmelises ruumis on antud punkt M 1 (x 1 , y 1 , z 1), mille χ tasandi normaalvõrrand on kujul cos α x + cos β y + cos γ z - p = 0, siis punktist tasandini M 1 H 1 jääva kauguse arvutamine tuletatakse valemist M 1 H 1 = cos α · x + cos β · y + cos γ · z - p, kuna x = x 1, y = y 1 , z = z1.
Tõestus
Teoreemi tõestus taandatakse punkti ja sirge kauguse leidmisele. Siit saame, et kaugus M 1-st χ tasandini on raadiusvektori M 1 arvprojektsiooni erinevuse moodul lähtepunktist χ tasandini. Siis saame avaldise M 1 H 1 = n p n → O M → - p . Tasapinna χ normaalvektor on kujul n → = cos α , cos β , cos γ ja selle pikkus on võrdne ühega, n p n → O M → on vektori O M → = (x 1 , y 1) arvprojektsioon , z 1) vektori n → poolt määratud suunas.
Rakendame skalaarvektorite arvutamise valemit. Seejärel saame avaldise vektori kujul n → , O M → = n → n p n → O M → = 1 n p n → O M → = n p n → O M → , kuna n → = cos α , cos β , cos γ z ja O M → = (x 1 , y 1 , z 1) . Märke koordinaatkuju saab kujul n →, O M → = cos α x 1 + cos β y 1 + cos γ z 1, siis M 1 H 1 = n p n → O M → - p = cos α x 1 + cos β · y 1 + cos γ · z 1 - p . Teoreem on tõestatud.
Siit saame, et kaugus punktist M 1 (x 1, y 1, z 1) tasapinnani χ arvutatakse, asendades tasandi normaalvõrrandi vasakpoolsesse serva cos α x + cos β y + cos. γ z - p = 0, mitte x, y, z koordinaadid x 1 , y 1 ja z1 mis on seotud punktiga M 1, võttes saadud väärtuse absoluutväärtuse.
Vaatleme näiteid koordinaatidega punktist antud tasapinnani kauguse leidmiseks.
Näide 1
Arvutage kaugus punktist koordinaatidega M 1 (5 , - 3 , 10) tasapinnani 2 x - y + 5 z - 3 = 0 .
Lahendus
Lahendame probleemi kahel viisil.
Esimene meetod algab sirge a suunavektori arvutamisega. Tingimusel saame, et antud võrrand 2 x - y + 5 z - 3 = 0 on üldtasandi võrrand ja n → = (2 , - 1 , 5) on antud tasandi normaalvektor. Seda kasutatakse antud tasapinnaga risti asetseva sirge a suunavektorina. Peaksite kirjutama punkti M 1 (5, - 3, 10) läbiva ruumi sirge kanoonilise võrrandi suunavektoriga koordinaatidega 2, - 1, 5.
Võrrand näeb välja selline: x - 5 2 = y - (- 3) - 1 = z - 10 5 ⇔ x - 5 2 = y + 3 - 1 = z - 10 5 .
Ristmikupunktid tuleks määratleda. Selleks ühendage võrrandid õrnalt süsteemiks üleminekuks kanoonilisest võrrandist kahe lõikuva sirge võrranditele. Võtame selle punkti kui H 1 . Me saame sellest aru
x - 5 2 = y + 3 - 1 = z - 10 5 ⇔ - 1 (x - 5) = 2 (y + 3) 5 (x - 5) = 2 (z - 10) 5 ( y + 3) = - 1 (z - 10) ⇔ ⇔ x + 2 y + 1 = 0 5 x - 2 z - 5 = 0 5 y + z + 5 = 0 ⇔ x + 2 y + 1 = 0 5 x - 2 z - 5 = 0
Seejärel peate süsteemi lubama
x + 2 y + 1 = 0 5 x - 2 z - 5 = 0 2 x - y + 5 z - 3 = 0 ⇔ x + 2 y = 1 5 x - 2 z = 5 2 x - y + 5 z = 3
Pöördume Gaussi järgi süsteemi lahendamise reegli poole:
1 2 0 - 1 5 0 - 2 5 2 - 1 5 3 ~ 1 2 0 - 1 0 - 10 - 2 10 0 - 5 5 5 ~ 1 2 0 - 1 0 - 10 - 2 10 0 0 6 0 ⇒ ⇒ z = 0 6 = 0, y = - 1 10 10 + 2 z = - 1, x = - 1 - 2 y = 1
Saame, et H 1 (1, - 1, 0) .
Arvutame kauguse antud punktist tasapinnani. Võtame punktid M 1 (5, - 3, 10) ja H 1 (1, - 1, 0) ja saame
M 1 H 1 = (1 - 5) 2 + (- 1 - (- 3)) 2 + (0 - 10) 2 \u003d 2 30
Teine lahendus on kõigepealt viia antud võrrand 2 x - y + 5 z - 3 = 0 normaalkujule. Määrame normaliseeriva teguri ja saame 1 2 2 + (- 1) 2 + 5 2 = 1 30 . Siit tuletame tasandi võrrandi 2 30 · x - 1 30 · y + 5 30 · z - 3 30 = 0 . Võrrandi vasak pool arvutatakse, asendades x \u003d 5, y \u003d - 3, z \u003d 10 ja peate võtma kauguse M 1 (5, - 3, 10) kuni 2 x - y + 5 z - 3 = 0 moodul. Saame väljendi:
M 1 H 1 = 2 30 5 - 1 30 - 3 + 5 30 10 - 3 30 \u003d 60 30 \u003d 2 30
Vastus: 2 30 .
Kui χ tasand on määratud tasandi määramise lõigumeetodite ühe meetodi abil, peate esmalt saama χ tasandi võrrandi ja arvutama vajaliku kauguse mis tahes meetodi abil.
Näide 2
Punktid koordinaatidega M 1 (5 , - 3 , 10) , A (0 , 2 , 1) , B (2 , 6 , 1) , C (4 , 0 , - 1) on seatud kolmemõõtmelisse ruumi. Arvutage kaugus punktist M 1 tasapinnani A B C.
Lahendus
Kõigepealt tuleb üles kirjutada antud kolme punkti läbiva tasapinna võrrand koordinaatidega M 1 (5, - 3, 10) , A (0 , 2 , 1) , B (2 , 6 , 1) , C ( 4 , 0 , - üks) .
x - 0 y - 2 z - 1 2 - 0 6 - 2 1 - 1 4 - 0 0 - 2 - 1 - 1 = 0 ⇔ x y - 2 z - 1 2 4 0 4 - 2 - 2 = 0 ⇔ ⇔ - 8x + 4a - 20z + 12 = 0 ⇔ 2x - y + 5z - 3 = 0
Sellest järeldub, et probleemil on eelmisega sarnane lahendus. Seega on punkti M 1 kaugus tasapinnast A B C 2 30 .
Vastus: 2 30 .
Tasapinna antud punktist või tasapinnast, millega nad on paralleelsed, on kauguse leidmine mugavam, kui rakendada valemit M 1 H 1 = cos α · x 1 + cos β · y 1 + cos γ · z 1 - p . Siit saame, et tasandite normaalvõrrandid saadakse mitme sammuga.
Näide 3
Leidke kaugus antud punktist koordinaatidega M 1 (- 3 , 2 , - 7) koordinaattasandini O x y z ja võrrandiga 2 y - 5 = 0 antud tasandini.
Lahendus
Koordinaattasand O y z vastab võrrandile kujul x = 0. O y z tasapinna puhul on see normaalne. Seetõttu on vaja avaldise vasakpoolsesse serva asendada väärtused x \u003d - 3 ja võtta kauguse absoluutväärtus punktist koordinaatidega M 1 (- 3, 2, - 7) tasapinnani. . Saame väärtuse, mis on võrdne - 3 = 3 .
Pärast teisendust saab tasandi normaalvõrrand 2 y - 5 = 0 kujul y - 5 2 = 0 . Siis saab leida vajaliku kauguse punktist koordinaatidega M 1 (- 3 , 2 , - 7) tasapinnani 2 y - 5 = 0 . Asendades ja arvutades saame 2 - 5 2 = 5 2 - 2.
Vastus: Soovitud kaugus M 1 (- 3 , 2 , - 7) kuni O y z on 3 ja 2 y - 5 = 0 väärtus on 5 2 - 2 .
Kui märkate tekstis viga, tõstke see esile ja vajutage Ctrl+Enter
Nii et lugesin sellel lehel midagi (http://gamedeveloperjourney.blogspot.com/2009/04/point-plane-collision-detection.html)
D = - D3DXVec3Dot(&vP1, &vNormal);
kus vP1 on tasapinna punkt ja vNormal on tasandi normaalne. Mind huvitab, kuidas see annab teile kauguse maailma algusest, kuna tulemus on alati 0. Selguse huvides (kuna ma olen 2D võrrandi D-osa osas endiselt veidi udune), d 2D võrrandis kaugus joonest läbi maailma alguse enne tasandi algust?
matemaatika3 vastust
6
Üldiselt saab punkti p ja tasapinna vahelise kauguse arvutada valemi abil
kus
ja kus p0 on tasapinna punkt.
Kui n on ühiku pikkusega, siis punktkorrutis vektori ja selle vahel on vektori projektsiooni (märgiga) pikkus normaalsele.
Teie esitatud valem on lihtsalt erijuhtum, kus punkt p on lähtekoht. Sel juhul
Kaugus = See võrdsus on tehniliselt vale, sest punktkorrutis on vektoritest, mitte punktidest... kuid siiski kehtib numbriliselt. Kui kirjutate selge valemi, saate selle (0 - p0.x)*n.x + (0 - p0.y)*n.y + (0 - p0.z)*n.z see on sama mis - (p0.x*n.x + p0.y*n.y + p0.z*n.z)
Tulemus ei ole alati null. Tulemus on null ainult siis, kui tasapind läbib alguspunkti. (Oletame siinkohal, et lennuk ei läbi lähtepunkti.) Põhimõtteliselt antakse teile joon lähtepunktist teatud punktini tasapinnal. (st teil on vektor algpunktist vP1-ni). Selle vektori probleem seisneb selles, et see on suure tõenäosusega viltu ja suundub lennukis mõnda kaugemasse kohta, mitte lennuki lähimasse punkti. Nii et kui võtsite lihtsalt vP1 pikkuse, saate liiga suure vahemaa. Peate saama vP1 projektsiooni mõnele vektorile, mis on tasandiga risti. See on muidugi vNormal. Nii et võtke vP1 ja vNormal punktkorrutis ning jagage see vNormal pikkusega ja teil on vastus. (Kui nad on piisavalt lahked, et anda teile vNormal, mis on juba suurusjärgus, siis pole vaja jagada.)
Selle probleemi saate lahendada Lagrange'i kordajatega: Teate, et lennuki lähim punkt peaks välja nägema selline: C=p+v Kus c on lähim punkt ja v on vektor piki tasapinda (mis on seega n-i normaalristi). Püüate leida c väikseima normiga (või ruutnormiga). Seega proovite minimeerida punkti(c,c) seni, kuni v on n-ga ortogonaalne (seega punkt(v,n) = 0). Seega määrake Lagrangian: L = punkt(c,c) + lambda * (punkt(v,n)) L = punkt(p+v,p+v) + lambda * (punkt(v,n)) L = punkt(p,p) + 2*punkt (p,v) + punkt (v,v) * lambda * (punkt (v,n)) Ja võtke tuletis v suhtes (ja määrake väärtuseks 0), et saada: 2 * p + 2 * v + lambda * n = 0 Lambda saab lahendada ülaltoodud võrrandis punktiiriga, moodustades n-i mõlemad küljed, et saada 2 * punkt(p,n) + 2 * punkt(v,n) + lambda * punkt(n,n) = 0 2 * punkt(p,n) + lambda = 0 lambda = - 2 * punkt(p,n) ) ) Pange tähele veelkord, et punkt(n,n) = 1 ja punkt(v,n) = 0 (kuna v on tasapinnal ja n on sellega ortogonaalne). Seejärel naaseb asendaja lambda, et saada: 2 * p + 2 * v - 2 * punkt(p,n) * n = 0 ja lahenda v jaoks, et saada: V = punkt(p,n) * n - p Seejärel ühendage see tagasi c = p + v, et saada: C = punkt(p,n) * n Selle vektori pikkus on |dot(p,n)| , ja märk näitab, kas punkt asub algpunktist normaalvektori suunas või lähtepunktist vastupidises suunas. oletame, et mul on tasapinna võrrand ax+by+cz=d, kuidas ma leian kõige lühema vahemaa tasapinnast lähtepunktini? Ma lähen sellest postitusest tagasi. Selles postituses nad... Oletame, et Kinect istub (0,0,0) ja vaatab +Z-suunas. Oletame, et punktides (1, 1, 1) on objekt ja üks Kinecti sügavuspildi pikslitest esindab seda objekti.... Tahan võrdsustada kauguse lähtepunktist kõigi punktideni, kus punktid on antud kahe koordinaadiga andmeraamiga. Mul on kõik punktid, näiteks: x y 1 0,0 0,0 2 -4,0 -2,8 3 -7,0 -6,5 4 -9,0 -11,1... Taustteave Mõelge sfäärilisele koordinaatsüsteemile, nagu siin näidatud: Koordinaatide süsteem http://www.shokhirev.com/nikolai/projects/global/image013.gif Konkreetse punkti puhul me... Mul on 3D-stseen ja kaamera, mis on määratletud gluPerspective'iga. Mul on fikseeritud FOV ja ma tean mis tahes geomeetria minimaalset kaugust kaamerast (see on esimese inimese vaade, seega... Mul on kolmnurk punktidega A, B, C ja ruumipunktiga (P). Kuidas saada kaugust punktist tasapinnani? Ma pean arvutama kauguse Pst lennukini, kuigi mu... Ma tahan pöörata CGP-punkti (punane ristkülik) ümber teise CGP-punkti (sinine ristkülik), kuid see muudab kaugust lähtepunktist (sinine ristkülik) ... kui annan nurgas 270, loob see... Ma pean leidma X, Y, Z tasapinna keskpunkti, ristkoordinaadid. Mul on tasapinna normaalväärtus ja kaugus selle keskpunktist lähtepunktini. Saan paigutada punkti(d) kõikjale ja... Antud on: punkt (x1, y1, z1) suunavektor (a1, b1, c1) tasapind ax + poolt + cz + d = 0 Kuidas leida kaugust D punktist tasapinnani piki seda vektorit? Aitäh Mul on kaamera koordinaatsüsteem, mis on määratletud pöördemaatriksiga R ja translatsiooniga T maailma koordinaatsüsteemi suhtes. Tasapind on kaamera koordinaatides defineeritud tavalise N ja sellel oleva punktiga P...
2
1
lühim kaugus tasapinnast lähtepunktini, kasutades tasandi võrrandit
Kas Kinecti sügavuspilt tähistab kaugust lähtepunktist või kaugust XY tasapinnast?
Kaugus koordinaatide alguspunktist ruumipunktini
sfäärilised koordinaadid - kaugus tasapinnast
Kuidas metoodiliselt valida perspektiivprojektsiooniks klipi lähedase tasandi kaugust?
Kuidas saada 3D-s kaugust punktist tasapinnani?
CG-punkti pööramine muudab kaugust lähtepunktist
Hankige tasapinna keskpunkt X, Y, Z, ristkoordinaadid
kaugus punktist tasapinnani kindlas suunas
Tasapinna teisendamine teise koordinaatsüsteemi