Tsüklilise pöörlemissageduse valemid. Võlli kiiruse määramine. HydroMuseum – RPM Kuidas pöörete arvu füüsikas defineeritakse
Mõnikord kerkivad autodega seoses esile küsimused matemaatikast ja füüsikast. Eelkõige on üks neist probleemidest nurkkiirus. See on seotud nii mehhanismide töö kui ka pöörete läbimisega. Mõelgem välja, kuidas seda väärtust määrata, milles seda mõõdetakse ja milliseid valemeid tuleks siin kasutada.
Kuidas määrata nurkkiirust: mis see väärtus on?
Füüsikalisest ja matemaatilisest vaatenurgast saab seda suurust määratleda järgmiselt: need on andmed, mis näitavad, kui kiiresti teatud punkt pöörleb ümber selle ringi keskpunkti, mida mööda see liigub.
VAATA VIDEOT
Sellel näiliselt puhtalt teoreetilisel väärtusel on auto töös arvestatav praktiline tähtsus. Siin on vaid mõned näited.
- On vaja õigesti korreleerida liigutused, millega rattad pöörlemisel pöörlevad. Trajektoori sisemist osa liikuva auto ratta nurkkiirus peab olema väiksem kui välimisel.
- On vaja arvutada, kui kiiresti väntvõll autos pöörleb.
- Lõpuks on ka autol endal kurvi läbides teatud hulk liikumisparameetreid – ja praktikas sõltub neist auto stabiilsus rajal ja ümbermineku tõenäosus.
Valem aja kohta, mis kulub punkti pöörlemiseks ümber etteantud raadiusega ringi
Nurkkiiruse arvutamiseks kasutatakse järgmist valemit:
ω = ∆φ /∆t
- ω (loe "omega") - tegelikult arvutatud väärtus.
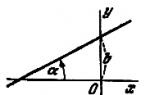
- ∆φ (hääldatakse "delta phi") on pöördenurk, vahe punkti nurgaasendi vahel mõõtmise esimesel ja viimasel hetkel.
- ∆t
(loe "delta te") - aeg, mille jooksul see nihe toimus. Täpsemalt, kuna "delta" tähendab erinevust mõõtmise alustamise ja selle lõppemise aja väärtuste vahel.
Ülaltoodud nurkkiiruse valem kehtib ainult üldistel juhtudel. Kui räägime ühtlaselt pöörlevatest objektidest või detaili pinnal oleva punkti liikumise, raadiuse ja pöörlemisaja vahelisest seosest, siis tuleb kasutada muid seoseid ja meetodeid. Eelkõige läheb siin juba vaja pöörlemissageduse valemit.
Nurkkiirust mõõdetakse erinevates ühikutes. Teoreetiliselt kasutatakse sageli rad/s (radiaan sekundis) või kraadi sekundis. See väärtus aga tähendab praktikas vähe ja seda saab kasutada vaid projekteerimistöödel. Praktikas mõõdetakse seda pigem pööretes sekundis (või minutis, kui räägime aeglastest protsessidest). Sellega seoses on see pöörlemissageduse lähedal.
Pöörlemisnurk ja pöördeperiood
Pöörlemisnurgast palju levinum on pöörlemissagedus, mis näitab, mitu pööret objekt teatud aja jooksul teeb. Fakt on see, et arvutustes kasutatav radiaan on nurk ringis, kui kaare pikkus võrdub raadiusega. Vastavalt sellele on kogu ringis 2 π radiaani. Arv π on irratsionaalne ja seda ei saa taandada ei kümnend- ega lihtmurruni. Seetõttu on ühtlase pöörlemise korral lihtsam seda sageduse järgi lugeda. Seda mõõdetakse p / min - pööret minutis.
Kui asi ei puuduta pikka aega, vaid ainult seda, mille jooksul toimub üks pööre, siis kasutatakse siin ringlusperioodi mõistet. See näitab, kui kiiresti tehakse üks ringliikumine. Mõõtühik on siin teine.
Suhet nurkkiiruse ja pöörlemiskiiruse või pöördeperioodi vahel näidatakse järgmiste valemitega:
ω = 2 π / T = 2 π *f,
- ω on nurkkiirus rad/s;
- T on ringlusperiood;
- f on pöörlemissagedus.
Saate proportsioonide reeglit kasutades saada mis tahes neist kolmest väärtusest teisest, unustamata seejuures mõõtmete tõlkimist ühte vormingusse (minutites või sekundites).
Mis on nurkkiirus konkreetsetel juhtudel?
Toome näite arvutusest, mis põhineb ülaltoodud valemitel. Oletame, et meil on auto. 100 km / h sõites teeb selle ratas, nagu praktika näitab, keskmiselt 600 pööret minutis (f = 600 p / min). Arvutame nurkkiiruse.
Kuna π-d on võimatu täpselt väljendada kümnendmurdudes, on tulemus ligikaudu 62,83 rad / s.
Nurk- ja lineaarkiiruste seos
Praktikas on sageli vaja kontrollida mitte ainult kiirust, millega pöörleva punkti nurkasend muutub, vaid ka selle enda kiirust lineaarse liikumise suhtes. Ülaltoodud näites tehti arvutused ratta kohta - kuid ratas liigub mööda teed ja kas pöörleb auto kiiruse mõjul või annab selle kiiruse ise. See tähendab, et igal ratta pinna punktil on lisaks nurkkiirusele ka lineaarne kiirus.
Lihtsaim viis selle arvutamiseks on raadiuse kaudu. Kuna kiirus sõltub ajast (mis on pöördeperiood) ja läbitud vahemaast (mis on ümbermõõt), siis ülaltoodud valemite alusel seostatakse nurk- ja lineaarkiirus järgmiselt:
- V on lineaarkiirus;
- R on raadius.
Valemist on ilmne, et mida suurem on raadius, seda suurem on sellise kiiruse väärtus. Suurima kiirusega ratta puhul liigub punkt turvise välispinnal (R on maksimaalne), kuid täpselt rummu keskel on lineaarkiirus null.
Kiirendus, moment ja nende seos massiga
Lisaks ülaltoodud kogustele on pöörlemisega seotud veel mitmeid punkte. Arvestades, kui palju erineva kaaluga pöörlevaid detaile autos on, ei saa mööda vaadata ka nende praktilisest tähendusest.
Ühtlane pöörlemine on oluline asi. Kuid pole ühtegi detaili, mis kogu aeg ühtlaselt keerleks. Mis tahes pöörleva sõlme pöörete arv väntvõllist rattani alati tõuseb ja seejärel langeb. Ja väärtust, mis näitab, kui palju pöörded on kasvanud, nimetatakse nurkkiirenduseks. Kuna see on nurkkiiruse tuletis, mõõdetakse seda radiaanides ruudus sekundis (kuna lineaarkiirendus on meetrites ruudus sekundis).
Liikumise ja selle muutumisega ajas on seotud ka teine aspekt - nurkimpulss. Kui siiamaani saime arvestada ainult liikumise puhtmatemaatilisi tunnuseid, siis siin tuleb juba arvestada asjaoluga, et igal osal on mass, mis jaotub ümber telje. Selle määrab punkti algse asukoha suhe, võttes arvesse liikumise suunda - ja impulssi, see tähendab massi ja kiiruse korrutist. Teades pöörlemise ajal tekkiva impulsi momenti, on võimalik kindlaks teha, milline koormus langeb igale osale, kui see suhtleb teisega.
Hing impulsi ülekande näitena
Tüüpiline näide sellest, kuidas kõik ülaltoodud andmed kehtivad, on konstantse kiirusega liigend (CV-liigend). Seda osa kasutatakse eelkõige esiveolistel sõidukitel, kus on oluline mitte ainult tagada rataste erinev pöörlemiskiirus pööramisel, vaid ka nende juhitavus ja impulsi ülekandmine mootorilt neile.
VAATA VIDEOT
Selle sõlme disain on täpselt loodud selleks, et:
- võrdsustada rataste pöörlemiskiirust;
- tagama pöörlemise pöörlemise hetkel;
- tagavad tagavedrustuse sõltumatuse.
Selle tulemusena võetakse SHRUS-i töös arvesse kõiki ülaltoodud valemeid.
Üks levinumaid liikumisviise looduses ja tehnikas on pöörlemine. Seda tüüpi kehade liikumist ruumis iseloomustab füüsikaliste suuruste kogum. Iga pöörlemise oluline omadus on sagedus. Pöörlemiskiiruse valemi saab leida teatud suurusi ja parameetreid teades.
Mis on rotatsioon?
Füüsikas mõistetakse selle all sellist materiaalse punkti liikumist ümber teatud telje, mille puhul selle kaugus selle teljega jääb konstantseks. Seda nimetatakse pöörderaadiuseks.
Sellise liikumise näideteks looduses on planeetide pöörlemine ümber Päikese ja ümber oma telje. Tehnikas tähistab pöörlemist võllide, hammasrataste, auto või jalgratta rataste liikumine, tuuleveskite labade liikumine.
Pöörlemist kirjeldavad füüsikalised suurused

Pöörlemise numbriliseks kirjeldamiseks füüsikas on kasutusele võetud mitmeid tunnuseid. Loetleme need ja kirjeldame neid.
Esiteks on see pöördenurk, mida tähistatakse θ. Kuna täisringi iseloomustab kesknurk 2 * pi radiaani, siis teades θ väärtust, mille võrra pöörlev keha teatud aja jooksul pöördus, on võimalik määrata pöörete arv selle aja jooksul. Lisaks võimaldab nurk θ arvutada keha läbitud lineaarse tee piki kõverat ringi. Pöörete arvu n ja läbitud vahemaa L vastavad valemid on järgmised:
Kus r on ringi raadius või pöörderaadius.
Vaadeldava liikumistüübi järgmine omadus on nurkkiirus. Tavaliselt tähistatakse seda tähega ω. Seda mõõdetakse radiaanides sekundis, st see näitab nurka radiaanides, mille pöörlev keha ühe sekundi jooksul pöörab. Nurkkiiruse jaoks ühtlase pöörlemise korral kehtib valem:
Nurksagedus, periood ja nurkkiirus
Eespool on juba märgitud, et mis tahes pöörleva liikumise oluline omadus on ühe pöörde sooritamiseks kuluv aeg. Seda aega nimetatakse pöörlemisperioodiks. Seda tähistatakse tähega T ja mõõdetakse sekundites. Perioodi T valemi saab kirjutada nurkkiiruse ω kaudu. Vastav väljend näeb välja selline:
Perioodi pöördväärtust nimetatakse sageduseks. Seda mõõdetakse hertsides (Hz). Ringikujuliseks liikumiseks on mugav kasutada mitte sagedust ennast, vaid selle nurgelist vastet. Tähistame seda f. Pöörlemissageduse f valem on järgmine:
Võrreldes kahte viimast valemit, saame järgmise võrdsuse:
See võrdsus tähendab järgmist:
- nurksageduse ja nurkkiiruse valemid langevad kokku, seetõttu on need suurused üksteisega arvuliselt võrdsed;
- samuti kiirus, sagedus näitab, millise nurga all radiaanides keha ühes sekundis pöörleb.
Nende suuruste erinevus on ainus: nurksagedus on skalaarsuurus, kiirus aga vektor.
Lineaarne pöörlemiskiirus, sagedus ja nurksagedus

Inseneriteaduses on mõnede pöörlevate konstruktsioonide, näiteks hammasrataste ja võllide puhul teada nende töösagedused μ ja joonkiirused v. Kuid kõiki neid omadusi saab kasutada nurk- või tsüklilise sageduse määramiseks.
Eespool märgiti, et sagedust μ mõõdetakse hertsides. See näitab pöörleva keha pöörete arvu ühes sekundis. Selle valem on järgmine:
Kui võrrelda seda avaldist f-i vastava võrdsusega, näeb seda kirjeldav pöördsageduse f kuni μ leidmise valem välja järgmine:
See valem on intuitiivne, kuna μ on pöörete arv ajaühikus, samas kui f on sama väärtus, väljendatuna ainult radiaanides.
Lineaarkiirus v on seotud nurkkiirusega ω järgmise võrrandiga:
Kuna f ja ω moodulid on võrdsed, on viimasest avaldisest lihtne saada vastav valem tsüklilise pöörlemissageduse jaoks. Paneme selle kirja:
Kus r on pöörderaadius. Pange tähele, et kiirus v suureneb lineaarselt raadiuse r suurenemisega, samas kui nende suuruste suhe on konstantne. Viimane järeldus tähendab, et kui mõõta tsüklilist pöörlemissagedust pöörleva massiivse objekti lõigu mis tahes punktis, siis on see igal pool sama.
Võlli tsüklilise kiiruse määramise ülesanne

Nurkkiirused sisaldavad kasulikku teavet, kuna need võimaldavad teil arvutada olulisi füüsilisi omadusi, nagu nurkimment või nurkkiirus. Lahendame järgmise probleemi: on teada, et võlli töökiirus on 1500 pööret minutis. Mis on selle võlli tsükliline sagedus?
Tingimuses antud mõõtühikutest selgub, et antud on tavaline sagedus μ. Seetõttu on tsüklilise võlli pöörlemissageduse valem järgmine:
Enne selle kasutamist peaksite tingimuses näidatud arvu teisendama standardseteks mõõtühikuteks, st vastastikusteks sekunditeks. Kuna võll teeb 1500 pööret minutis, siis sekundiga teeb see 60 korda vähem pööret ehk 25. See tähendab, et selle pöörlemissagedus on 25 Hz. Asendades selle arvu ülalpool kirjutatud valemiga, saame tsüklilise sageduse väärtuse: f = 157 rad/s.
Seadmete projekteerimisel on vaja teada elektrimootori pöörete arvu. Kiiruse arvutamiseks on olemas spetsiaalsed valemid, mis on vahelduv- ja alalisvoolumootorite puhul erinevad.
Sünkroonsed ja asünkroonsed elektrimasinad
Vahelduvvoolumootoreid on kolme tüüpi: sünkroonsed, mille rootori nurkkiirus langeb kokku staatori magnetvälja nurksagedusega; asünkroonne - neis jääb rootori pöörlemine välja pöörlemisest maha; kollektor, mille konstruktsioon ja tööpõhimõte on sarnased alalisvoolumootoritele.
Sünkroonne kiirus
Vahelduvvoolu elektrimasina pöörlemiskiirus sõltub staatori magnetvälja nurksagedusest. Seda kiirust nimetatakse sünkroonseks. Sünkroonmootorites pöörleb võll sama kiirusega, mis on nende elektrimasinate eelis.
Selleks on suure võimsusega masinate rootoris mähis, millele rakendatakse pidev pinge, mis tekitab magnetvälja. Madala võimsusega seadmetes sisestatakse rootorisse püsimagnetid või on selgelt väljendunud poolused.
Libisemine
Asünkroonsetes masinates on võlli pöörete arv väiksem kui sünkroonne nurksagedus. Seda erinevust nimetatakse "S-libisemiseks". Libisemise tõttu indutseeritakse rootoris elektrivool ja võll pöörleb. Mida suurem S, seda suurem on pöördemoment ja väiksem kiirus. Kui aga libisemine ületab teatud väärtuse, siis elektrimootor seiskub, hakkab üle kuumenema ja võib rikki minna. Selliste seadmete pöörlemiskiirus arvutatakse alloleval joonisel oleva valemi järgi, kus:
- n on pöörete arv minutis,
- f - võrgu sagedus,
- p on pooluste paaride arv,
- s - libisemine.

Selliseid seadmeid on kahte tüüpi:
- Oravapuuriga rootoriga. Selles olev mähis on tootmisprotsessi käigus alumiiniumist valatud;
- Faasirootoriga. Mähised on valmistatud traadist ja on ühendatud lisatakistustega.
Kiiruse reguleerimine
Töö käigus on vaja reguleerida elektrimasinate pöörete arvu. See viiakse läbi kolmel viisil:
- Täiendava takistuse suurendamine faasirootoriga elektrimootorite rootoriahelas. Kui on vaja kiirust oluliselt vähendada, on lubatud ühendada mitte kolm, vaid kaks takistust;
- Täiendavate takistuste ühendamine staatori ahelas. Seda kasutatakse suure võimsusega elektrimasinate käivitamiseks ja väikeste elektrimootorite kiiruse reguleerimiseks. Näiteks lauaventilaatori pöörete arvu saab vähendada, ühendades sellega järjestikku hõõglambi või kondensaatori. Sama tulemus annab toitepinge vähenemise;
- Võrgu sageduse muutmine. Sobib sünkroon- ja asünkroonmootoritele.
Tähelepanu! Vahelduvvooluvõrgust töötavate kollektorelektrimootorite pöörlemiskiirus ei sõltu võrgu sagedusest.
DC mootorid
Lisaks vahelduvvoolumasinatele on alalisvooluvõrku ühendatud elektrimootorid. Selliste seadmete pöörete arv arvutatakse täiesti erinevate valemite abil.
Nimetatud pöörlemiskiirus
Alalisvoolumasina pöörete arv arvutatakse alloleval joonisel oleva valemi abil, kus:
- n on pöörete arv minutis,
- U - võrgu pinge,
- Rya ja Iya - armatuuri takistus ja vool,
- Ce – mootori konstant (sõltub elektrimasina tüübist),
- F on staatori magnetväli.
Need andmed vastavad elektrimasina parameetrite nimiväärtustele, väljamähise ja armatuuri pingele või mootori võlli pöördemomendile. Nende muutmine võimaldab reguleerida kiirust. Reaalses mootoris on magnetvoogu väga raske määrata, seetõttu kasutatakse arvutusteks ergutusmähist läbiva voolu tugevust või armatuuri pinget.

Vahelduvvoolu kollektori mootorite pöörete arvu saab leida sama valemi abil.
Kiiruse reguleerimine
Alalisvooluvõrgust töötava elektrimootori kiiruse reguleerimine on võimalik laias vahemikus. See on saadaval kahes vahemikus:
- Nominaalsest ülespoole. Selleks vähendatakse täiendavate takistuste või pingeregulaatori abil magnetvoogu;
- Alla par. Selleks on vaja vähendada elektrimootori armatuuri pinget või lülitada sisse sellega järjestikku takistus. Lisaks kiiruse vähendamisele tehakse seda elektrimootori käivitamisel.
Seadmete projekteerimisel ja kasutuselevõtul on vaja teada, milliseid valemeid kasutatakse elektrimootori pöörlemiskiiruse arvutamiseks.
Video