3. järku lineaarvõrrandisüsteem. Lineaaralgebravõrrandisüsteemide lahendamine, lahendusmeetodid, näited. V.S. Štšipatšov, Kõrgem matemaatika, ptk.10, lk.2
Vaatleme 3 võrrandisüsteemi kolme tundmatuga
Kolmandat järku determinante kasutades saab sellise süsteemi lahendi kirjutada samal kujul nagu kahe võrrandisüsteemi puhul, s.t.
 (2.4)
(2.4)
kui 0. Siin
see on Crameri reegel kolmest tundmatust koosneva kolme lineaarvõrrandi süsteemi lahendamine.
Näide 2.3. Lahendage Crameri reegli abil lineaarvõrrandisüsteem:

Lahendus . Süsteemi põhimaatriksi determinandi leidmine

Kuna 0, siis saab süsteemile lahenduse leidmiseks rakendada Crameri reeglit, kuid esmalt arvutada veel kolm determinanti:

Eksam:

Seetõttu leitakse lahendus õigesti.
2. ja 3. järku lineaarsete süsteemide jaoks saadud Crameri reeglid viitavad sellele, et samu reegleid saab sõnastada mis tahes järku lineaarsete süsteemide jaoks. Tõesti toimub
Crameri teoreem. Lineaarvõrrandi ruutsüsteem süsteemi põhimaatriksi nullist erineva determinandiga (0) on üks ja ainult üks lahendus ning see lahendus arvutatakse valemitega
 (2.5)
(2.5)
kus – põhimaatriksi determinant, i – maatriksi determinant, tuletatud peamisest, asendamisestiveerg vabade liikmete veerg.
Pange tähele, et kui =0, siis Crameri reegel ei kehti. See tähendab, et süsteemil pole lahendusi üldse või on lahendusi lõpmatult palju.
Olles formuleerinud Crameri teoreemi, tekib loomulikult küsimus kõrgemat järku determinantide arvutamisest.
2.4. n-ndat järku determinandid
Täiendav alaealine M ij element a ij nimetatakse determinandiks, mis on saadud kustutamise teel etteantust i-th rida ja j-s veerg. Algebraline liitmine A ij element a ij nimetatakse selle elemendi minooriks koos märgiga (–1) i + j, st. A ij = (–1) i + j M ij .
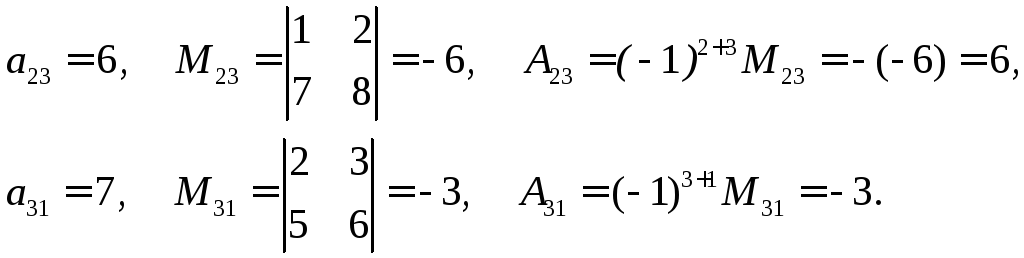
Näiteks leiame elementide minoorsed ja algebralised täiendid a 23 ja a 31 määrajat

Saame
Kasutades algebralise komplemendi mõistet, saame sõnastada determinantide laiendusteoreemn- järjekorras rea või veeru järgi.
Teoreem 2.1. MaatriksdeterminantAvõrdub mõne rea (või veeru) kõigi elementide ja nende algebraliste täiendite korrutistega:
 (2.6)
(2.6)
See teoreem on ühe peamise determinantide arvutamise meetodi, nn. tellimuste vähendamise meetod. Determinandi laienemise tulemusena n järjekorras mis tahes reas või veerus saame n determinanti ( n–1)-ndas järjekorras. Et selliseid determinante oleks vähem, on soovitatav valida see rida või veerg, millel on kõige rohkem nulle. Praktikas kirjutatakse determinandi laiendusvalem tavaliselt järgmiselt:

need. algebralised liited on kirjutatud selgesõnaliselt alaealiste terminites.
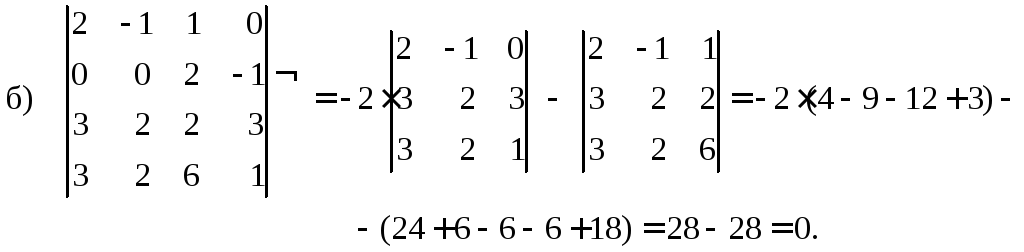
Näited 2.4. Arvutage determinandid, laiendades neid esmalt mis tahes reas või veerus. Tavaliselt valige sellistel juhtudel veerg või rida, millel on kõige rohkem nulle. Valitud rida või veerg märgitakse noolega.

2.5. Determinantide põhiomadused
Laiendades determinanti mis tahes reas või veerus, saame n determinanti ( n–1)-ndas järjekorras. Seejärel kõik need determinandid ( n–1)-nda järgu saab lagundada ka determinantide summaks ( n–2) järjekorras. Seda protsessi jätkates võib jõuda 1. järku determinantideni, s.o. maatriksi elementidele, mille determinanti arvutatakse. Seega peate teist järku determinantide arvutamiseks arvutama kahe liikme summa, 3. järku determinantide jaoks - 6 liikme summa, 4. järku determinantide jaoks - 24 liikme summa. Terminite arv suureneb järsult, kui determinandi järjestus suureneb. See tähendab, et väga kõrge astme determinantide arvutamine muutub üsna töömahukaks ülesandeks, mis ei jõua isegi arvutile. Determinante saab aga arvutada ka muul viisil, kasutades determinantide omadusi.
Vara 1 . Determinant ei muutu, kui selles vahetatakse ridu ja veerge, st. maatriksi transponeerimisel:
 .
.
See omadus näitab determinandi ridade ja veergude võrdsust. Teisisõnu, iga väide determinandi veergude kohta kehtib selle ridade kohta ja vastupidi.
Vara 2 . Kahe rea (veeru) vahetamisel muudab determinant märki.
Tagajärg . Kui determinandil on kaks identset rida (veergu), siis on see võrdne nulliga.
Vara 3 . Determinandi märgist võib välja võtta mis tahes rea (veeru) kõigi elementide ühisteguri.
Näiteks,

Tagajärg . Kui determinandi mõne rea (veeru) kõik elemendid on võrdsed nulliga, siis on determinant ise võrdne nulliga.
Vara 4 . Determinant ei muutu, kui ühe rea (veeru) elemendid liidetakse teise rea (veeru) elementidele ja korrutatakse mingi arvuga.
Näiteks,

Vara 5 . Maatriksi korrutise determinant on võrdne maatriksi determinantide korrutisega:
Praktiline töö
"Kolmanda järku lineaarvõrrandisüsteemide lahendamine Crameri meetodil"
Töö eesmärgid:
avardada arusaamist SLE lahendamise meetoditest ja töötada välja algoritm SLE lahendamiseks Cramori meetodil;
arendada õpilaste loogilist mõtlemist, oskust leida probleemile ratsionaalne lahendus;
harida õpilasi kirjaliku matemaatilise kõne täpsuse ja kultuuri alal, kui nad otsuse teevad.
Teoreetiline alusmaterjal.
Crameri meetod. Rakendus lineaarvõrrandisüsteemide jaoks.
Antud on N tundmatutega lineaarse algebralise võrrandi (SLAE) süsteem, mille kordajateks on maatriksi elemendid ja vabaliikmeteks arvud
Esimene indeks koefitsientide kõrval näitab, millises võrrandis koefitsient asub, ja teine - millisel tundmatutest see asub. 
Kui maatriksi determinant ei ole võrdne nulliga
siis on lineaarsete algebraliste võrrandite süsteemil ainulaadne lahendus. Lineaarsete algebraliste võrrandite süsteemi lahendus on selline järjestatud arvude hulk , mis muudab süsteemi kõik võrrandid õigeks võrrandiks. Kui süsteemi kõigi võrrandite paremad küljed on võrdsed nulliga, siis nimetatakse võrrandisüsteemi homogeenseks. Juhul, kui mõned neist on nullist erinevad, on ebaühtlased ![]() Kui lineaarsete algebraliste võrrandite süsteemil on vähemalt üks lahend, siis nimetatakse seda ühilduvaks, vastasel juhul on see ühildumatu. Kui süsteemi lahendus on unikaalne, siis lineaarvõrrandisüsteemi nimetatakse kindlaks. Juhul, kui ühilduva süsteemi lahendus ei ole unikaalne, nimetatakse võrrandisüsteemi määramatuks. Kahte lineaarvõrrandi süsteemi nimetatakse ekvivalentseteks (või ekvivalentseteks), kui ühe süsteemi kõik lahendid on teise lahendused ja vastupidi. Samaväärsed (või samaväärsed) süsteemid saadakse ekvivalentsete teisenduste abil.
Kui lineaarsete algebraliste võrrandite süsteemil on vähemalt üks lahend, siis nimetatakse seda ühilduvaks, vastasel juhul on see ühildumatu. Kui süsteemi lahendus on unikaalne, siis lineaarvõrrandisüsteemi nimetatakse kindlaks. Juhul, kui ühilduva süsteemi lahendus ei ole unikaalne, nimetatakse võrrandisüsteemi määramatuks. Kahte lineaarvõrrandi süsteemi nimetatakse ekvivalentseteks (või ekvivalentseteks), kui ühe süsteemi kõik lahendid on teise lahendused ja vastupidi. Samaväärsed (või samaväärsed) süsteemid saadakse ekvivalentsete teisenduste abil. 
SLAE samaväärsed teisendused
1) võrrandite ümberpaigutamine;
2) võrrandite korrutamine (või jagamine) nullist erineva arvuga;
3) mõnele võrrandile teise võrrandi lisamine, mis on korrutatud suvalise nullist erineva arvuga.
SLAE lahenduse võib leida erineval viisil, näiteks Crameri valemite abil (Crameri meetod)
Crameri teoreem. Kui tundmatutega lineaarsete algebraliste võrrandite süsteemi determinant on nullist erinev, siis on sellel süsteemil ainulaadne lahendus, mis leitakse Crameri valemitega: ![]()
![]() - determinandid, mis moodustuvad vabaliikmete veeru -nda veeru asendamisega.
- determinandid, mis moodustuvad vabaliikmete veeru -nda veeru asendamisega.
Kui , ja vähemalt üks on nullist erinev, pole SLAE-l lahendusi. Kui ![]() , siis on SLAE-l palju lahendusi.
, siis on SLAE-l palju lahendusi.
Antakse kolmest lineaarsest võrrandist koosnev süsteem kolme tundmatuga. Lahendage süsteem Crameri meetodil
Lahendus. 
Leidke tundmatute koefitsientide maatriksi determinant

Kuna , siis on antud võrrandisüsteem järjekindel ja sellel on kordumatu lahendus. Arvutame determinandid:



Crameri valemeid kasutades leiame tundmatud
Niisiis ![]() süsteemi ainus lahendus.
süsteemi ainus lahendus.
Antud on neljast lineaarsest algebralisest võrrandist koosnev süsteem. Lahendage süsteem Crameri meetodil.

Leiame tundmatute koefitsientide maatriksi determinandi. Selleks laiendame seda esimese rea võrra.


Leidke determinandi komponendid:


Asendage leitud väärtused determinandiga
Seega on determinant võrrandisüsteem järjekindel ja sellel on ainulaadne lahendus. Arvutame determinandid Crameri valemite abil:
Hindamiskriteeriumid:
Tööd hinnatakse hindega "3", kui: üks süsteemidest on iseseisvalt täielikult ja korrektselt lahendatud.
Tööd hinnatakse hindega "4", kui: mis tahes kaks süsteemi on täielikult ja õigesti lahendatud iseseisvalt.
Tööd hinnatakse hindega "5", kui: kolm süsteemi on täielikult ja korrektselt iseseisvalt lahendatud.
Crameri meetod põhineb determinantide kasutamisel lineaarvõrrandisüsteemide lahendamisel. See kiirendab oluliselt lahendusprotsessi.
Crameri meetodi abil saab lahendada nii paljudest lineaarsetest võrranditest koosneva süsteemi kui igas võrrandis on tundmatuid. Kui süsteemi determinant ei ole võrdne nulliga, siis saab lahenduses kasutada Crameri meetodit, kui see on võrdne nulliga, siis mitte. Lisaks saab Crameri meetodit kasutada lineaarvõrrandisüsteemide lahendamiseks, millel on unikaalne lahendus.
Definitsioon. Tundmatute koefitsientidest koosnevat determinanti nimetatakse süsteemi determinandiks ja seda tähistatakse (delta).
Determinandid
saadakse, asendades koefitsiendid vastavate tundmatute juures vabade terminitega:
 ;
;
 .
.
Crameri teoreem. Kui süsteemi determinant on nullist erinev, siis on lineaarvõrrandisüsteemil üks lahendus ja tundmatu on võrdne determinantide suhtega. Nimetaja on süsteemi determinant ja lugeja on determinant, mis saadakse süsteemi determinandist, asendades koefitsiendid tundmatuga vabade liikmetega. See teoreem kehtib mis tahes järku lineaarvõrrandisüsteemi kohta.
Näide 1 Lahendage lineaarvõrrandisüsteem:
Vastavalt Crameri teoreem meil on:
Niisiis, süsteemi (2) lahendus:
veebikalkulaator, Crameri lahendusmeetod.
Kolm juhtumit lineaarvõrrandisüsteemide lahendamisel
Nagu selgub alates Crameri teoreemid Lineaarvõrrandisüsteemi lahendamisel võib esineda kolm juhtumit:

Esimene juhtum: lineaarvõrrandisüsteemil on ainulaadne lahendus
(süsteem on järjekindel ja kindel)

Teine juhtum: lineaarvõrrandisüsteemil on lõpmatu arv lahendeid
(süsteem on järjekindel ja määramatu)
** ![]() ,
,
need. tundmatute ja vabaliikmete koefitsiendid on võrdelised.

Kolmas juhtum: lineaarvõrrandisüsteemil pole lahendeid
(süsteem ebajärjekindel)
Seega süsteem m lineaarvõrrandid n nimetatakse muutujaid Sobimatu kui sellel pole lahendusi ja liigend kui sellel on vähemalt üks lahendus. Nimetatakse ühendatud võrrandisüsteemi, millel on ainult üks lahend teatud, ja rohkem kui üks ebakindel.
Näited lineaarvõrrandisüsteemide lahendamisest Crameri meetodil
Las süsteem
 .
.
Crameri teoreemi alusel
………….
,
kus  -
-
süsteemi identifikaator. Ülejäänud determinandid saadakse, asendades veeru vastava muutuja (tundmatu) koefitsientidega vabaliikmetega:


Näide 2
 .
.

Seetõttu on süsteem kindel. Selle lahenduse leidmiseks arvutame determinandid


Crameri valemite järgi leiame:
![]()
Seega on (1; 0; -1) süsteemi ainus lahendus.
Võrrandisüsteemide 3 X 3 ja 4 X 4 lahenduste kontrollimiseks võite kasutada veebikalkulaatorit, Crameri lahendusmeetodit.
Kui lineaarvõrrandisüsteemis ei ole ühes või mitmes võrrandis muutujaid, siis determinandis on neile vastavad elemendid võrdsed nulliga! See on järgmine näide.
Näide 3 Lahendage lineaarvõrrandisüsteem Crameri meetodil:
 .
.
Lahendus. Leiame süsteemi determinandi:

Vaadake hoolikalt võrrandisüsteemi ja süsteemi determinanti ning korrake vastust küsimusele, millistel juhtudel on determinandi üks või mitu elementi võrdsed nulliga. Seega ei ole determinant võrdne nulliga, seega on süsteem kindel. Selle lahenduse leidmiseks arvutame tundmatute determinandid


Crameri valemite järgi leiame:
Seega on süsteemi lahendus (2; -1; 1).
Võrrandisüsteemide 3 X 3 ja 4 X 4 lahenduste kontrollimiseks võite kasutada veebikalkulaatorit, Crameri lahendusmeetodit.
Lehe ülaosa
Jätkame koos Crameri meetodil süsteemide lahendamist
Nagu juba mainitud, kui süsteemi determinant on võrdne nulliga ja tundmatute determinandid ei ole nulliga, on süsteem ebajärjekindel, see tähendab, et tal pole lahendusi. Illustreerime järgmise näitega.
Näide 6 Lahendage lineaarvõrrandisüsteem Crameri meetodil:

Lahendus. Leiame süsteemi determinandi:
Süsteemi determinant on võrdne nulliga, seetõttu on lineaarvõrrandisüsteem kas ebajärjekindel ja kindel või vastuoluline, see tähendab, et tal pole lahendeid. Selguse huvides arvutame tundmatute determinandid


Tundmatute determinandid ei ole nulliga võrdsed, seetõttu on süsteem ebajärjekindel, st tal pole lahendusi.
Võrrandisüsteemide 3 X 3 ja 4 X 4 lahenduste kontrollimiseks võite kasutada veebikalkulaatorit, Crameri lahendusmeetodit.
Lineaarvõrrandisüsteemide ülesannetes on ka selliseid, kus lisaks muutujaid tähistavatele tähtedele on ka teisi tähti. Need tähed tähistavad mõnda numbrit, enamasti reaalarvu. Praktikas toovad sellised võrrandid ja võrrandisüsteemid kaasa probleeme mis tahes nähtuste ja objektide üldiste omaduste leidmisel. See tähendab, et leiutasite mingi uue materjali või seadme ja selle omaduste kirjeldamiseks, mis on levinud olenemata koopiate suurusest või arvust, peate lahendama lineaarvõrrandisüsteemi, kus muutujate mõne koefitsiendi asemel on tähed. Näiteid ei pea kaugelt otsima.
Järgmine näide on sarnase probleemi jaoks, suureneb ainult mõnda reaalarvu tähistavate võrrandite, muutujate ja tähtede arv.
Näide 8 Lahendage lineaarvõrrandisüsteem Crameri meetodil:
Lahendus. Leiame süsteemi determinandi:
Tundmatute määrajate leidmine

RCHB KAITSE SÕJAÜLIKOOLI KOSTROMA FILIAAL
Osakond "Juhtimise ja juhtimise automatiseerimine"
Ainult õpetajatele
"Ma kiidan heaks"
Osakonnajuhataja nr 9
Kolonel YAKOVLEV A.B.
"____" __________________ 2004
Dotsent A.I. Smirnova
"MÄÄRAJAD.
LINEAARVÕRDSÜSTEEMIDE LAHENDUS"
LOENG № 2 / 1
Arutati osakonna koosolekul nr 9
"________" ___________ 2004
Protokoll nr ___________
Kostroma, 2004.
Sissejuhatus
1. Teise ja kolmanda järgu determinandid.
2. Determinantide omadused. Dekompositsiooni teoreem.
3. Crameri teoreem.
Järeldus
Kirjandus
1. V.E. Schneider et al., A Short Course in Higher Mathematics, I köide, Ch. 2, punkt 1.
2. V.S. Štšipatšov, Kõrgem matemaatika, ptk.10, lk.2.
SISSEJUHATUS
Loengus käsitletakse teise ja kolmanda järgu determinante, nende omadusi. Nagu ka Crameri teoreem, mis võimaldab determinantide abil lahendada lineaarvõrrandisüsteeme. Determinante kasutatakse ka hiljem teemas "Vektoralgebra" vektorite ristkorrutise arvutamisel.
1. õppeküsimus TEISE JA KOLMANDA KVALIFIKATSIOONID
TELLIMINE
Vaatleme vormi nelja numbriga tabelit
Tabelis olevad numbrid on tähistatud kahe indeksiga tähega. Esimene indeks tähistab rea numbrit, teine indeks näitab veeru numbrit.
MÄÄRATLUS 1.Teist järku determinant helistasväljenduslahke:
(1)Numbrid a 11, …, a 22 nimetatakse determinandi elementideks.
Elementidest moodustatud diagonaal a 11 ; a 22 nimetatakse peamiseks ja diagonaaliks, mille moodustavad elemendid a 12 ; a 21 - küljel.
Seega on teist järku determinant võrdne põhi- ja sekundaardiagonaali elementide korrutistega.
Pange tähele, et vastus on arv.
NÄITED. Arvutama:
Mõelge nüüd üheksa numbriga tabelile, mis on kirjutatud kolmes reas ja kolmes veerus:
MÄÄRATLUS 2. Kolmandat järku determinant nimetatakse vormi väljenduseks:
Elemendid a 11; a 22 ; a 33 - moodustavad põhidiagonaali.
Numbrid a 13; a 22 ; a 31 - moodustavad külgdiagonaali.
Kujutame skemaatiliselt, kuidas pluss- ja miinusterminid moodustuvad:
" + " " – "Pluss sisaldab: põhidiagonaalil olevate elementide korrutist, ülejäänud kaks terminit on põhidiagonaaliga paralleelsete alustega kolmnurkade tippudes paiknevate elementide korrutis.
Miinusega terminid moodustatakse samamoodi sekundaarse diagonaali suhtes.
Seda kolmandat järku determinandi arvutamise reeglit nimetatakse
õige
NÄITED. Arvutage kolmnurkade reegli järgi:
KOMMENTEERI. Determinante nimetatakse ka determinantideks.
2. õppeküsimus MÄÄRAJATE OMADUSED.
LAIENDUSTEOREEM
Vara 1. Determinandi väärtus ei muutu, kui selle read vahetatakse vastavate veergudega.
.Laiendades mõlemat determinanti, oleme veendunud võrdsuse kehtivuses.
Atribuut 1 määrab determinandi ridade ja veergude võrdsuse. Seetõttu formuleeritakse determinandi kõik edasised omadused nii ridade kui ka veergude jaoks.
Vara 2. Kui kaks rida (või veergu) vahetatakse, muudab determinant märgi vastupidiseks, säilitades absoluutväärtuse.
.Vara 3. Reaelementide ühine kordaja(või veerus)saab determinandi märgist välja võtta.
.Vara 4. Kui determinandil on kaks identset rida (või veergu), siis on see võrdne nulliga.
Seda omadust saab tõestada otsese kontrolliga või kasutada atribuuti 2.
Tähistage determinanti tähega D. Kahe identse esimese ja teise rea vahetamisel see ei muutu ja teise omaduse järgi peab ta muutma märki, s.t.
D = - DÞ 2 D = 0 ÞD = 0.
Vara 5. Kui mõne stringi kõik elemendid(või veerus)on null, siis on determinant null.
Seda omadust võib käsitleda kui atribuudi 3 erijuhtu
Vara 6. Kui kahe rea elemendid(või veerud)determinant on võrdelised, siis on determinant null.
.Seda saab tõestada otsese kontrollimise või omaduste 3 ja 4 abil.
Vara 7. Determinandi väärtus ei muutu, kui mõne rea (või veeru) elemendid liidetakse teise rea (või veeru) vastavatele elementidele, korrutades sama arvuga.
.Seda tõestab otsene kontroll.
Nende omaduste kasutamine võib mõnel juhul hõlbustada determinantide, eriti kolmandat järku, arvutamise protsessi.
Järgneva jaoks vajame minoorse ja algebralise täiendi mõisteid. Kolmanda järjekorra määratlemiseks kaaluge neid mõisteid.
MÄÄRATLUS 3. Alaealine Kolmandat järku determinandi antud elemendist nimetatakse teist järku determinandiks, mis saadakse antud elemendist, kustutades rea ja veeru, mille ristumiskohas antud element asub.
Väike element aij tähistatud Mij. Nii et elemendi jaoks a 11 alaealine
See saadakse kolmanda järgu determinandi esimese rea ja esimese veeru kustutamisel.
MÄÄRATLUS 4. Determinandi elemendi algebraline komplement nimetage seda alaealiseks korrutatuna(-1)k, kusk- nende rea- ja veerunumbrite summa, mille ristumiskohas antud element asub.
Algebralise elemendi liitmine aij tähistatud AGAij.
Sellel viisil, AGAij =
.Kirjutame välja elementide algebralised täiendid a 11 ja a 12.
. .Kasulik on meeles pidada reeglit: determinandi elemendi algebraline täiend on võrdne selle märgilise molliga pluss, kui rea ja veeru numbrite summa, milles element asub, isegi, ja märgiga miinus kui see summa kummaline.
NÄIDE. Leidke determinandi esimese rea elementide mollid ja algebralised täiendid:
On selge, et mollid ja algebralised täiendid võivad erineda ainult märgi poolest.
Vaatleme ilma tõestuseta olulist teoreemi - determinantide laiendusteoreem.
LAIENDUSTEOREEM
Determinant on võrdne mis tahes rea või veeru elementide ja nende algebraliste täiendite korrutistega.
Seda teoreemi kasutades kirjutame esimesse ritta kolmandat järku determinandi laienduse.
.Laiendatud:
.Viimast valemit saab kasutada kolmanda järgu determinandi arvutamisel peamise valemina.
Dekompositsiooni teoreem võimaldab meil taandada kolmandat järku determinandi arvutamise kolme teist järku determinandi arvutamiseks.
Dekompositsiooniteoreem annab teise võimaluse kolmandat järku determinantide arvutamiseks.
NÄITED. Arvutage determinant, kasutades laiendusteoreemi.
Lineaaralgebralise võrrandi (SLAE) süsteemide lahendamine on kahtlemata lineaaralgebra kursuse kõige olulisem teema. Suur hulk matemaatika kõigist harudest pärit ülesandeid taandatakse lineaarvõrrandisüsteemide lahendamisele. Need tegurid selgitavad selle artikli loomise põhjust. Artikli materjal on valitud ja struktureeritud nii, et selle abiga saate
- valida oma lineaarsete algebraliste võrrandite süsteemi lahendamiseks optimaalne meetod,
- uurida valitud meetodi teooriat,
- lahendage oma lineaarvõrrandisüsteem, olles üksikasjalikult kaalunud tüüpiliste näidete ja ülesannete lahendusi.
Artikli materjali lühikirjeldus.
Esiteks anname kõik vajalikud definitsioonid, mõisted ja tutvustame mõningaid tähistusi.
Järgmisena käsitleme meetodeid lineaarsete algebraliste võrrandite süsteemide lahendamiseks, milles võrrandite arv on võrdne tundmatute muutujate arvuga ja millel on kordumatu lahendus. Esiteks keskendume Crameri meetodile, teiseks näitame maatriksmeetodit selliste võrrandisüsteemide lahendamiseks ja kolmandaks analüüsime Gaussi meetodit (tundmatute muutujate järjestikuse kõrvaldamise meetod). Teooria kinnistamiseks lahendame kindlasti mitu SLAE-d erineval viisil.
Seejärel asume lahendama üldkuju lineaarsete algebraliste võrrandite süsteeme, milles võrrandite arv ei lange kokku tundmatute muutujate arvuga või süsteemi põhimaatriks on degenereerunud. Sõnastame Kroneckeri-Capelli teoreemi, mis võimaldab kindlaks teha SLAE-de ühilduvuse. Analüüsime süsteemide lahendust (nende ühilduvuse korral) maatriksi alusmolli mõistet kasutades. Vaatleme ka Gaussi meetodit ja kirjeldame üksikasjalikult näidete lahendusi.
Peatuge kindlasti lineaarsete algebraliste võrrandite homogeensete ja mittehomogeensete süsteemide üldlahenduse struktuuril. Toome välja fundamentaallahenduste süsteemi kontseptsiooni ja näitame, kuidas SLAE üldlahendus kirjutatakse, kasutades põhilahenduste süsteemi vektoreid. Parema mõistmise huvides vaatame mõnda näidet.
Kokkuvõtteks vaatleme nii lineaarseteks taandatud võrrandisüsteeme kui ka erinevaid probleeme, mille lahendamisel tekivad SLAE-d.
Leheküljel navigeerimine.
Definitsioonid, mõisted, tähistused.
Vaatleme p lineaarsete algebraliste võrrandite süsteeme n tundmatu muutujaga (p võib olla võrdne n ) kujul
Tundmatud muutujad, - koefitsiendid (mõned reaal- või kompleksarvud), - vabaliikmed (ka reaal- või kompleksarvud).
Seda SLAE vormi nimetatakse koordineerida.
AT maatriksvorm sellel võrrandisüsteemil on vorm,
kus  - süsteemi põhimaatriks, - tundmatute muutujate maatriks-veerg, - vabaliikmete maatriks-veerg.
- süsteemi põhimaatriks, - tundmatute muutujate maatriks-veerg, - vabaliikmete maatriks-veerg.
Kui liita maatriksile A (n + 1)-ndaks veeruks vabade liikmete maatriks-veerg, siis saame nn. laiendatud maatriks lineaarvõrrandisüsteemid. Tavaliselt tähistatakse suurendatud maatriksit tähega T ja vabade liikmete veerg eraldatakse ülejäänud veergudest vertikaalse joonega, st 
Lahendades lineaarsete algebraliste võrrandite süsteemi Seda nimetatakse tundmatute muutujate väärtuste kogumiks, mis muudab kõik süsteemi võrrandid identiteetideks. Tundmatute muutujate antud väärtuste maatriksvõrrand muutub samuti identiteediks.
Kui võrrandisüsteemil on vähemalt üks lahend, siis seda nimetatakse liigend.
Kui võrrandisüsteemil pole lahendeid, siis nimetatakse seda Sobimatu.
Kui SLAE-l on ainulaadne lahendus, nimetatakse seda teatud; kui lahendusi on rohkem kui üks, siis - ebakindel.
Kui süsteemi kõigi võrrandite vabaliikmed on võrdsed nulliga ![]() , siis kutsutakse süsteem välja homogeenne, muidu - heterogeenne.
, siis kutsutakse süsteem välja homogeenne, muidu - heterogeenne.
Lineaaralgebralise võrrandi elementaarsüsteemide lahendus.
Kui süsteemivõrrandite arv on võrdne tundmatute muutujate arvuga ja selle põhimaatriksi determinant ei ole võrdne nulliga, siis kutsume selliseid SLAE-sid elementaarne. Sellistel võrrandisüsteemidel on ainulaadne lahendus ja homogeense süsteemi korral on kõik tundmatud muutujad võrdsed nulliga.
Sellist SLAE-d hakkasime õppima keskkoolis. Nende lahendamisel võtsime ühe võrrandi, väljendasime ühe tundmatu muutuja teistega ja asendasime selle ülejäänud võrranditega, seejärel võtsime järgmise võrrandi, väljendasime järgmise tundmatu muutuja ja asendasime selle teiste võrranditega jne. Või kasutasid nad liitmismeetodit, st lisasid kaks või enam võrrandit, et kõrvaldada mõned tundmatud muutujad. Me ei peatu nendel meetoditel üksikasjalikult, kuna need on sisuliselt Gaussi meetodi modifikatsioonid.
Lineaarvõrrandi elementaarsüsteemide lahendamise peamised meetodid on Crameri meetod, maatriksmeetod ja Gaussi meetod. Sorteerime need ära.
Lineaarvõrrandisüsteemide lahendamine Crameri meetodil.
Peame lahendama lineaarsete algebraliste võrrandite süsteemi 
milles võrrandite arv võrdub tundmatute muutujate arvuga ja süsteemi põhimaatriksi determinant erineb nullist ehk .
Laskma olema süsteemi põhimaatriksi determinant ja ![]() on maatriksite determinandid, mis saadakse A-st asendamise teel 1., 2., …, n veerus vastavalt vabade liikmete veergu:
on maatriksite determinandid, mis saadakse A-st asendamise teel 1., 2., …, n veerus vastavalt vabade liikmete veergu: 
Sellise tähistusega arvutatakse tundmatud muutujad Crameri meetodi valemitega as  . Nii leitakse Crameri meetodil lineaarsete algebraliste võrrandite süsteemi lahendus.
. Nii leitakse Crameri meetodil lineaarsete algebraliste võrrandite süsteemi lahendus.
Näide.
Crameri meetod  .
.
Lahendus.
Süsteemi põhimaatriksil on vorm  . Arvutage selle determinant (vajadusel vaadake artiklit):
. Arvutage selle determinant (vajadusel vaadake artiklit): 
Kuna süsteemi põhimaatriksi determinant on nullist erinev, on süsteemil ainulaadne lahendus, mille saab leida Crameri meetodil.
Koostage ja arvutage vajalikud determinandid ![]() (determinant saadakse maatriksi A esimese veeru asendamisel vabaliikmete veeruga, determinant - teise veeru asendamisega vabade liikmete veeruga, - maatriksi A kolmanda veeru asendamisega vabade liikmete veeruga ):
(determinant saadakse maatriksi A esimese veeru asendamisel vabaliikmete veeruga, determinant - teise veeru asendamisega vabade liikmete veeruga, - maatriksi A kolmanda veeru asendamisega vabade liikmete veeruga ): 
Tundmatute muutujate leidmine valemite abil  :
:
Vastus:
Crameri meetodi peamiseks puuduseks (kui seda võib nimetada puuduseks) on determinantide arvutamise keerukus, kui süsteemivõrrandite arv on suurem kui kolm.
Lineaaralgebralise võrrandi süsteemide lahendamine maatriksmeetodil (pöördmaatriksi abil).
Olgu lineaarsete algebraliste võrrandite süsteem antud maatriksi kujul , kus maatriksi A mõõtmed on n korda n ja selle determinant on nullist erinev.
Kuna , siis on maatriks A inverteeritav, st on olemas pöördmaatriks . Kui korrutada mõlemad võrdsuse osad vasakul olevaga, siis saame valemi tundmatute muutujate veerumaatriksi leidmiseks. Seega saime lineaarsete algebraliste võrrandite süsteemi lahenduse maatriksmeetodil.
Näide.
Lineaarvõrrandisüsteemi lahendamine maatriks meetod.
Lahendus.
Kirjutame võrrandisüsteemi ümber maatriksi kujul: 
Sest
siis saab SLAE-d lahendada maatriksmeetodil. Kasutades pöördmaatriksit, võib selle süsteemi lahenduse leida järgmiselt  .
.
Koostame pöördmaatriksi maatriksi A elementide algebraliste täiendite maatriksi abil (vajadusel vaata artiklit): 
Jääb üle arvutada - tundmatute muutujate maatriks pöördmaatriksi korrutamisega  vabaliikmete maatriks-veerul (vajadusel vaata artiklit):
vabaliikmete maatriks-veerul (vajadusel vaata artiklit): 
Vastus:
 või mõnes teises tähises x 1 = 4, x 2 = 0, x 3 = -1.
või mõnes teises tähises x 1 = 4, x 2 = 0, x 3 = -1.
Lineaaralgebraliste võrrandite süsteemidele maatriksmeetodil lahenduste leidmisel on põhiprobleemiks pöördmaatriksi leidmise keerukus, eriti kolmandast kõrgema järgu ruutmaatriksite puhul.
Lineaarvõrrandisüsteemide lahendamine Gaussi meetodil.
Oletame, et peame leidma lahenduse n lineaarse võrrandi süsteemile, millel on n tundmatu muutuja 
mille põhimaatriksi determinant erineb nullist.
Gaussi meetodi olemus seisneb tundmatute muutujate järjestikuses välistamises: esiteks jäetakse süsteemi kõigist võrranditest välja x 1, alates teisest, seejärel jäetakse x 2 kõigist võrranditest välja, alustades kolmandast ja nii edasi, kuni ainult tundmatu muutujani. x n jääb viimasesse võrrandisse. Sellist süsteemi võrrandite teisendamise protsessi tundmatute muutujate järjestikuseks elimineerimiseks nimetatakse otsene Gaussi meetod. Pärast Gaussi meetodi edasikäigu lõpetamist leitakse x n viimasest võrrandist, x n-1 arvutatakse seda väärtust kasutades eelviimasest võrrandist ja nii edasi, x 1 leitakse esimesest võrrandist. Tundmatute muutujate arvutamise protsessi süsteemi viimaselt võrrandilt esimesele liikumisel nimetatakse vastupidine Gaussi meetod.
Kirjeldame lühidalt tundmatute muutujate kõrvaldamise algoritmi.
Eeldame, et , kuna me saame selle alati saavutada süsteemi võrrandite ümberkorraldamisega. Tundmatu muutuja x 1 jätame süsteemi kõikidest võrranditest välja, alates teisest. Selleks liida esimene võrrand korrutatuna süsteemi teisele võrrandile, liida esimene korrutatud võrrand kolmandale võrrandile ja nii edasi, liida esimene korrutatuna n-ndale võrrandile. Võrrandisüsteem pärast selliseid teisendusi võtab kuju 
kus , a  .
.
Sama tulemuseni jõuaksime, kui väljendaksime x 1 süsteemi esimeses võrrandis teiste tundmatute muutujate kaudu ja asendaksime saadud avaldise kõigi teiste võrranditega. Seega jäetakse muutuja x 1 kõigist võrranditest välja, alates teisest.
Järgmisena toimime sarnaselt, kuid ainult saadud süsteemi osaga, mis on joonisel märgitud 
Selleks liida süsteemi kolmandale võrrandile teine korrutatud, neljandale võrrandile liidetakse teine korrutatuna ja nii edasi, liidetakse teine korrutatuna n-ndale võrrandile. Võrrandisüsteem pärast selliseid teisendusi võtab kuju 
kus , a  . Seega jäetakse muutuja x 2 kõigist võrranditest välja, alates kolmandast.
. Seega jäetakse muutuja x 2 kõigist võrranditest välja, alates kolmandast.
Järgmisena jätkame tundmatu x 3 kõrvaldamist, toimides samamoodi joonisel märgitud süsteemiosaga 
Seega jätkame Gaussi meetodi otsest kulgu, kuni süsteem võtab kuju 
Sellest hetkest alustame Gaussi meetodi vastupidist kulgu: arvutame x n viimasest võrrandist kui , kasutades saadud väärtust x n leiame eelviimasest võrrandist x n-1 ja nii edasi, leiame esimesest võrrandist x 1 võrrand.
Näide.
Lineaarvõrrandisüsteemi lahendamine Gaussi meetod.
Lahendus.
Jätame süsteemi teisest ja kolmandast võrrandist välja tundmatu muutuja x 1. Selleks lisame teise ja kolmanda võrrandi mõlemale osale esimese võrrandi vastavad osad, korrutatuna vastavalt ja arvuga: 
Nüüd jätame x 2 kolmandast võrrandist välja, lisades selle vasak- ja parempoolsele osale teise võrrandi vasak- ja parempoolsed osad, korrutatuna järgmisega: 
Sellega on Gaussi meetodi edasiliikumine lõpetatud, alustame vastupidist kurssi.
Saadud võrrandisüsteemi viimasest võrrandist leiame x 3: 
Teisest võrrandist saame .
Esimesest võrrandist leiame ülejäänud tundmatu muutuja ja see lõpetab Gaussi meetodi vastupidise käigu.
Vastus:
X 1 \u003d 4, x 2 = 0, x 3 = -1.
Üldkujuliste lineaarsete algebraliste võrrandite süsteemide lahendamine.
Üldjuhul ei lange süsteemi p võrrandite arv kokku tundmatute muutujate arvuga n:
Sellistel SLAE-del ei pruugi olla lahendusi, neil võib olla üks lahendus või lõpmatult palju lahendusi. See väide kehtib ka võrrandisüsteemide kohta, mille põhimaatriks on ruudukujuline ja degenereerunud.
Kroneckeri-Capelli teoreem.
Enne lineaarvõrrandisüsteemi lahenduse leidmist on vaja kindlaks teha selle ühilduvus. Vastus küsimusele, millal SLAE ühildub ja millal mitte, annab vastuse Kronecker-Capelli teoreem:
n tundmatuga võrrandite süsteemi p (p võib olla võrdne n ) järjepidevuse tagamiseks on vajalik ja piisav, et süsteemi põhimaatriksi auaste on võrdne laiendatud maatriksi astmega, st Rank( A)=Aste(T) .
Vaatleme näiteks Kroneckeri-Cappelli teoreemi rakendamist lineaarvõrrandisüsteemi ühilduvuse määramiseks.
Näide.
Uurige, kas lineaarvõrrandisüsteemil on  lahendusi.
lahendusi.
Lahendus.
 . Kasutagem alaealiste piiritlemise meetodit. Teise järgu alaealine
. Kasutagem alaealiste piiritlemise meetodit. Teise järgu alaealine  nullist erinev. Vaatame seda ümbritsevaid kolmanda järgu alaealisi:
nullist erinev. Vaatame seda ümbritsevaid kolmanda järgu alaealisi: 
Kuna kõik piirnevad kolmanda järgu alaealised on võrdsed nulliga, on põhimaatriksi auaste kaks.
Omakorda suurendatud maatriksi auaste  on võrdne kolmega, kuna kolmanda järgu moll
on võrdne kolmega, kuna kolmanda järgu moll 
nullist erinev.
Sellel viisil, Vahemik(A) , seega võime Kroneckeri-Capelli teoreemi järgi järeldada, et algne lineaarvõrrandisüsteem on vastuolus.
Vastus:
Lahendussüsteemi ei ole.
Niisiis, oleme õppinud tuvastama süsteemi ebakõla Kroneckeri-Capelli teoreemi abil.
Aga kuidas leida SLAE lahendus, kui selle ühilduvus on kindlaks tehtud?
Selleks vajame maatriksi põhimolli kontseptsiooni ja maatriksi järgu teoreemi.
Nimetatakse maatriksi A kõrgeimat järku minoori, mis ei ole null põhilised.
Põhimolli definitsioonist järeldub, et selle järjekord on võrdne maatriksi auastmega. Nullist erineva maatriksi A puhul võib olla mitu põhimolli, alati on üks põhimoll.
Mõelge näiteks maatriksile  .
.
Kõik selle maatriksi kolmandat järku minoorsed väärtused on võrdsed nulliga, kuna selle maatriksi kolmanda rea elemendid on esimese ja teise rea vastavate elementide summa.
Järgmised teist järku alaealised on põhilised, kuna need on nullist erinevad 
Alaealised  ei ole põhilised, kuna need on võrdsed nulliga.
ei ole põhilised, kuna need on võrdsed nulliga.
Maatriksjärgu teoreem.
Kui maatriksi järku p järgi n on r, siis kõik maatriksi ridade (ja veergude) elemendid, mis ei moodusta valitud põhimolli, väljendatakse lineaarselt ridade (ja veergude) vastavate elementidena. ), mis on aluseks mollile.
Mida annab meile maatriksi auaste teoreem?
Kui oleme Kroneckeri-Capelli teoreemi abil tuvastanud süsteemi ühilduvuse, siis valime süsteemi põhimaatriksist suvalise põhimolli (selle järjekord on võrdne r-ga) ja jätame süsteemist välja kõik võrrandid, mis ei moodustada valitud põhimoll. Sel viisil saadud SLAE on samaväärne esialgsega, kuna kõrvalejäetud võrrandid on endiselt üleliigsed (maatriksi järgu teoreemi järgi on need ülejäänud võrrandite lineaarne kombinatsioon).
Selle tulemusena on pärast süsteemi liigsete võrrandite kõrvalejätmist võimalikud kaks juhtumit.
Kui saadud süsteemis on võrrandite arv r võrdne tundmatute muutujate arvuga, siis on see kindel ja ainsa lahenduse saab leida Crameri meetodil, maatriksmeetodil või Gaussi meetodil.
Näide.
 .
.
Lahendus.
Süsteemi põhimaatriksi aste  on võrdne kahega, kuna teist järku moll
on võrdne kahega, kuna teist järku moll  nullist erinev. Laiendatud maatriksi auaste
nullist erinev. Laiendatud maatriksi auaste  on samuti võrdne kahega, kuna ainus kolmanda järgu moll on võrdne nulliga
on samuti võrdne kahega, kuna ainus kolmanda järgu moll on võrdne nulliga 
ja eespool vaadeldud teist järku moll erineb nullist. Kroneckeri-Capelli teoreemi põhjal võib väita algse lineaarvõrrandisüsteemi ühilduvust, kuna Rank(A)=Aste(T)=2 .
Aluseks võtame kõrvaleriala . See moodustub esimese ja teise võrrandi koefitsientidest: 
Süsteemi kolmas võrrand ei osale põhimolli moodustamises, seega jätame selle maatriksjärgu teoreemi alusel süsteemist välja: 
Nii oleme saanud lineaarsete algebraliste võrrandite elementaarse süsteemi. Lahendame selle Crameri meetodil: 
Vastus:
x 1 \u003d 1, x 2 = 2.
Kui saadud SLAE võrrandite arv r on väiksem kui tundmatute muutujate arv n , siis jätame põhiminoori moodustavad terminid võrrandite vasakpoolsetesse osadesse ja ülejäänud liikmed kanname võrrandite parempoolsetesse osadesse. süsteemist vastupidise märgiga.
Tundmatuid muutujaid (neid on r), mis jäävad võrrandite vasakule poolele, nimetatakse peamine.
Nimetatakse tundmatuid muutujaid (neid on n - r), mis sattusid paremale poole tasuta.
Nüüd eeldame, et vabad tundmatud muutujad võivad võtta suvalisi väärtusi, samas kui r peamist tundmatut muutujat väljendatakse vabade tundmatute muutujatena ainulaadsel viisil. Nende väljenduse saab leida, lahendades saadud SLAE Crameri meetodil, maatriksmeetodil või Gaussi meetodil.
Võtame näite.
Näide.
Lineaarsete algebraliste võrrandite süsteemi lahendamine  .
.
Lahendus.
Leidke süsteemi põhimaatriksi auaste  piirnevate alaealiste meetodil. Võtame 1 1 = 1 kui nullist erinevat esimest järku minoori. Alustame selle molli ümber nullist erineva teist järku molli otsimist:
piirnevate alaealiste meetodil. Võtame 1 1 = 1 kui nullist erinevat esimest järku minoori. Alustame selle molli ümber nullist erineva teist järku molli otsimist: 
Seega leidsime teist järku nullist erineva molli. Hakkame otsima kolmandat järku nullist erineva piiriga molli: 
Seega on põhimaatriksi auaste kolm. Laiendatud maatriksi auaste on samuti võrdne kolmega, see tähendab, et süsteem on järjekindel.
Põhiliseks võetakse kolmanda järgu leitud nullist erinev moll.
Selguse huvides näitame elemente, mis moodustavad põhialuse: 
Jätame põhimollis osalevad terminid süsteemi võrrandite vasakusse serva ja ülejäänud kanname vastasmärkidega paremale poole: 
Anname vabadele tundmatutele muutujatele x 2 ja x 5 suvalised väärtused, st võtame ![]() , kus on suvalised arvud. Sel juhul võtab SLAE vormi
, kus on suvalised arvud. Sel juhul võtab SLAE vormi 
Saadud lineaarsete algebraliste võrrandite elementaarsüsteemi lahendame Crameri meetodil: 
Järelikult,.
Ärge unustage vastuses märkida tasuta tundmatuid muutujaid.
Vastus:
Kus on suvalised arvud.
Tehke kokkuvõte.
Üldkujuga lineaarsete algebraliste võrrandite süsteemi lahendamiseks selgitame esmalt välja selle ühilduvuse Kroneckeri-Capelli teoreemi abil. Kui põhimaatriksi auaste ei ole võrdne laiendatud maatriksi auastmega, siis järeldame, et süsteem on vastuolus.
Kui põhimaatriksi auaste on võrdne laiendatud maatriksi auastmega, siis valime põhimolli ja jätame kõrvale süsteemi võrrandid, mis ei osale valitud põhimolli moodustamisel.
Kui alusmolli järjekord on võrdne tundmatute muutujate arvuga, siis on SLAE-l unikaalne lahendus, mille saab leida mistahes meile teadaoleva meetodiga.
Kui alusminoori järjekord on väiksem kui tundmatute muutujate arv, siis jätame põhitundmatute muutujatega liikmed süsteemi võrrandite vasakusse serva, ülejäänud liikmed kanname paremale poole ja omistame suvalised väärtused vabadele tundmatutele muutujatele. Saadud lineaarvõrrandisüsteemist leiame peamised tundmatud muutujad Crameri meetodil, maatriksmeetodil või Gaussi meetodil.
Gaussi meetod üldkujuliste lineaarsete algebraliste võrrandite süsteemide lahendamiseks.
Gaussi meetodit kasutades saab lahendada mis tahes tüüpi lineaarsete algebraliste võrrandite süsteeme ilma nende ühilduvuse eeluuringuta. Tundmatute muutujate järjestikuse kõrvaldamise protsess võimaldab teha järelduse nii SLAE ühilduvuse kui ka ebakõla kohta ning kui lahendus on olemas, võimaldab see selle leida.
Arvutustöö seisukohalt eelistatakse Gaussi meetodit.
Vaata selle üksikasjalikku kirjeldust ja analüüsitud näiteid artiklist Gaussi meetod üldkujuliste lineaarsete algebraliste võrrandite süsteemide lahendamiseks.
Homogeensete ja ebahomogeensete lineaaralgebrasüsteemide üldlahenduse registreerimine, kasutades põhilahenduste süsteemi vektoreid.
Selles jaotises keskendume lineaarsete algebraliste võrrandite homogeensetele ja mittehomogeensetele ühendatud süsteemidele, millel on lõpmatu arv lahendusi.
Kõigepealt käsitleme homogeenseid süsteeme.
Fundamentaalne otsustussüsteem P lineaarsete algebraliste võrrandite homogeenne süsteem n tundmatu muutujaga on selle süsteemi (n – r) lineaarselt sõltumatute lahendite hulk, kus r on süsteemi põhimaatriksi alusmolli järjekord.
Kui tähistame homogeense SLAE lineaarselt sõltumatuid lahendusi X (1) , X (2) , …, X (n-r) (X (1) , X (2) , …, X (n-r) on maatriksite veerud mõõtmetega n 1 ) , siis on selle homogeense süsteemi üldlahend kujutatud põhilahenduste süsteemi vektorite lineaarse kombinatsioonina suvaliste konstantsete koefitsientidega С 1 , С 2 , …, С (n-r), st .
Mida tähendab mõiste homogeense lineaarsete algebraliste võrrandite süsteemi (oroslau) üldlahend?
Tähendus on lihtne: valem määrab ära kõik võimalikud lahendused algsele SLAE-le, teisisõnu võttes suvaliste konstantide C 1 , C 2 , ..., C (n-r) väärtused vastavalt valemile me saab ühe algse homogeense SLAE lahendustest.
Seega, kui leiame fundamentaalse lahenduste süsteemi, saame kõik selle homogeense SLAE lahendused seada .
Näitame homogeense SLAE põhilahenduste süsteemi konstrueerimise protsessi.
Valime algse lineaarvõrrandisüsteemi põhimolli, jätame süsteemist välja kõik teised võrrandid ja kanname vastasmärkidega süsteemi võrrandite paremale poolele kõik vabu tundmatuid muutujaid sisaldavad terminid. Anname vabadele tundmatutele muutujatele väärtused 1,0,0,…,0 ja arvutame peamised tundmatud, lahendades saadud lineaarvõrrandi elementaarsüsteemi mis tahes viisil, näiteks Crameri meetodil. Seega saadakse X (1) – põhisüsteemi esimene lahendus. Kui anname vabadele tundmatutele väärtused 0,1,0,0,…,0 ja arvutame peamised tundmatud, siis saame X (2) . Ja nii edasi. Kui anname vabadele tundmatutele muutujatele väärtused 0,0,…,0,1 ja arvutame peamised tundmatud, siis saame X (n-r) . Nii konstrueeritakse homogeense SLAE põhilahenduste süsteem ja saab kirjutada selle üldlahenduse kujul .
Lineaarsete algebraliste võrrandite ebahomogeensete süsteemide korral esitatakse üldlahend järgmiselt
Vaatame näiteid.
Näide.
Leia põhilahenduste süsteem ja homogeense lineaaralgebralise võrrandisüsteemi üldlahendus  .
.
Lahendus.
Homogeensete lineaarvõrrandisüsteemide põhimaatriksi järg on alati võrdne laiendatud maatriksi astmega. Leiame põhimaatriksi auastme alaealiste ääristamise meetodil. Esimest järku nullist erineva minoorina võtame süsteemi põhimaatriksi elemendi a 1 1 = 9. Leidke teist järku ääristav nullist erinev moll: 
Leitakse teist järku moll, mis erineb nullist. Vaatame nullist erinevat otsides läbi sellega piirnevad kolmanda järgu alaealised: 
Kõik külgnevad kolmanda järgu alaealised on võrdsed nulliga, seetõttu on põhi- ja laiendatud maatriksi auaste kaks. Võtame põhilise molli. Selguse huvides märgime selle moodustava süsteemi elemendid: 
Algse SLAE kolmas võrrand ei osale põhimolli moodustamises, seetõttu võib selle välistada: 
Peamisi tundmatuid sisaldavad terminid jätame võrrandite paremale poolele ja vabade tundmatutega terminid kanname paremale poolele:
Koostagem algse homogeense lineaarvõrrandisüsteemi lahenduste põhisüsteem. Selle SLAE põhilahenduste süsteem koosneb kahest lahendusest, kuna algne SLAE sisaldab nelja tundmatut muutujat ja selle põhimollide järjekord on kaks. X (1) leidmiseks anname vabadele tundmatutele muutujatele väärtused x 2 \u003d 1, x 4 \u003d 0, seejärel leiame võrrandisüsteemist peamised tundmatud  .
.
Lahendame selle Crameri meetodil: 
Sellel viisil, .
Nüüd ehitame X (2) . Selleks anname vabadele tundmatutele muutujatele väärtused x 2 \u003d 0, x 4 \u003d 1, seejärel leiame lineaarvõrrandisüsteemist peamised tundmatud  .
.
Kasutame uuesti Crameri meetodit: 
Saame .
Nii saime kaks põhilahenduste süsteemi vektorit ja nüüd saame üles kirjutada homogeense lineaarsete algebraliste võrrandite süsteemi üldlahenduse:  , kus C 1 ja C 2 on suvalised arvud., on võrdsed nulliga. Samuti võtame põhiliseks molli, jätame süsteemist välja kolmanda võrrandi ja kanname vabade tundmatutega liikmed süsteemivõrrandi paremale poolele:
, kus C 1 ja C 2 on suvalised arvud., on võrdsed nulliga. Samuti võtame põhiliseks molli, jätame süsteemist välja kolmanda võrrandi ja kanname vabade tundmatutega liikmed süsteemivõrrandi paremale poolele: 
Leidmiseks anname vabadele tundmatutele muutujatele väärtused x 2 \u003d 0 ja x 4 \u003d 0, siis võtab võrrandisüsteem kuju  , millest leiame Crameri meetodil peamised tundmatud muutujad:
, millest leiame Crameri meetodil peamised tundmatud muutujad: 
Meil on  , Järelikult
, Järelikult 
kus C 1 ja C 2 on suvalised arvud.
Tuleb märkida, et ebamäärase homogeense lineaarsete algebraliste võrrandite süsteemi lahendused genereerivad lineaarne ruum Lahendus.
Ellipsoidi kanooniline võrrand ristkülikukujulises Descartes'i koordinaatsüsteemis on kujul  . Meie ülesanne on määrata parameetrid a , b ja c . Kuna ellipsoid läbib punkte A, B ja C, siis nende koordinaatide asendamisel ellipsoidi kanoonilises võrrandis peaks see muutuma identiteediks. Nii saame kolme võrrandi süsteemi:
. Meie ülesanne on määrata parameetrid a , b ja c . Kuna ellipsoid läbib punkte A, B ja C, siis nende koordinaatide asendamisel ellipsoidi kanoonilises võrrandis peaks see muutuma identiteediks. Nii saame kolme võrrandi süsteemi: 
Tähistage ![]() , siis muutub süsteem lineaarsete algebraliste võrrandite süsteemiks
, siis muutub süsteem lineaarsete algebraliste võrrandite süsteemiks  .
.
Arvutame välja süsteemi põhimaatriksi determinandi: 
Kuna see on nullist erinev, leiame lahenduse Crameri meetodil:
). Ilmselt on x = 0 ja x = 1 selle polünoomi juured. jagatis jagamisest ![]() peal
peal ![]() on . Seega on meil lagunemine ja algne avaldis saab kuju
on . Seega on meil lagunemine ja algne avaldis saab kuju  .
.
Kasutame määramatute koefitsientide meetodit. 
Võrdsustades lugejate vastavad koefitsiendid, jõuame lineaarsete algebraliste võrrandite süsteemini  . Selle lahendus annab meile soovitud määramatud koefitsiendid A, B, C ja D.
. Selle lahendus annab meile soovitud määramatud koefitsiendid A, B, C ja D.
Lahendame süsteemi Gaussi meetodil: 
Gaussi meetodi vastupidisel käigul leiame D = 0, C = -2, B = 1, A = 1 .
Saame 
Vastus:
 .
.