3. rendű lineáris egyenletrendszer. Lineáris algebrai egyenletrendszerek megoldása, megoldási módszerek, példák. V.S. Shchipachev, Felső matematika, 10. fejezet, 2. o
Tekintsünk egy három egyenletből álló rendszert három ismeretlennel
Harmadrendű determinánsok felhasználásával egy ilyen rendszer megoldása ugyanolyan formában írható fel, mint egy két egyenletrendszer esetében, azaz.
 (2.4)
(2.4)
ha 0. Itt
Ez Cramer szabálya egy három lineáris egyenletrendszer megoldása három ismeretlenben.
2.3. példa. Oldjon meg egy lineáris egyenletrendszert a Cramer-szabály segítségével:

Megoldás . A rendszer főmátrixának determinánsának megkeresése

Mivel 0, akkor a rendszer megoldásához alkalmazhatja a Cramer-szabályt, de először számítson ki három további determinánst:

Vizsgálat:

Ezért a megoldás helyesen található.
A 2. és 3. rendű lineáris rendszerekre kapott Cramer-szabályok azt sugallják, hogy ugyanazok a szabályok bármilyen rendű lineáris rendszerekre is megfogalmazhatók. tényleg megtörténik
Cramer tétele. Lineáris egyenletrendszer másodfokú egyenletrendszere a rendszer főmátrixának nullától eltérő determinánsával (0) egy és csak egy megoldása van, és ezt a megoldást a képletek számítják ki
 (2.5)
(2.5)
ahol – fő mátrix meghatározó, én – mátrix meghatározó, főből, pótlásból származtatjákénth oszlop szabad tagok rovata.
Vegye figyelembe, hogy ha =0, akkor a Cramer-szabály nem alkalmazható. Ez azt jelenti, hogy a rendszernek vagy egyáltalán nincs megoldása, vagy végtelen sok megoldása van.
A Cramer-tétel megfogalmazása után természetesen felmerül a magasabb rendű determinánsok számításának kérdése.
2.4. n-edrendű determinánsok
További kiskorú M ij elem a ij az adottból törléssel kapott determinánsnak nevezzük én-edik sor és j-adik oszlop. Algebrai összeadás A ij elem a ij ennek az elemnek a molljának nevezzük, a (–1) jellel együtt én + j, azaz A ij = (–1) én + j M ij .
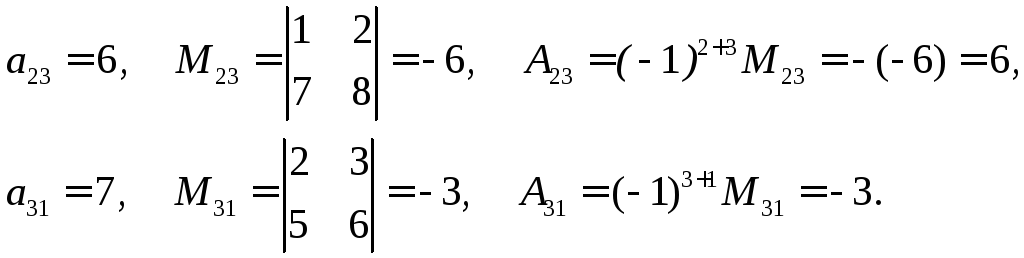
Keressük például az elemek molljait és algebrai kiegészítéseit a 23 és a 31 meghatározó

Kapunk
Az algebrai komplement fogalmát felhasználva megfogalmazhatjuk a determináns kiterjesztési tételn- sor vagy oszlop szerinti sorrend.
Tétel 2.1. Mátrix meghatározóAegyenlő egy sor (vagy oszlop) összes elemének és algebrai komplementereinek szorzatával:
 (2.6)
(2.6)
Ez a tétel alapozza meg a determinánsok számításának egyik fő módszerét, az ún. rendeléscsökkentési módszer. A determináns bővülésének eredményeként n sorrendben bármely sorban vagy oszlopban n determinánst kapunk ( n–1)-edik rend. Annak érdekében, hogy kevesebb ilyen determináns legyen, célszerű azt a sort vagy oszlopot kiválasztani, amelyben a legtöbb nulla szerepel. A gyakorlatban a determináns bővítési képlete általában a következőképpen írható:

azok. Az algebrai összeadásokat kifejezetten mollokra írjuk.
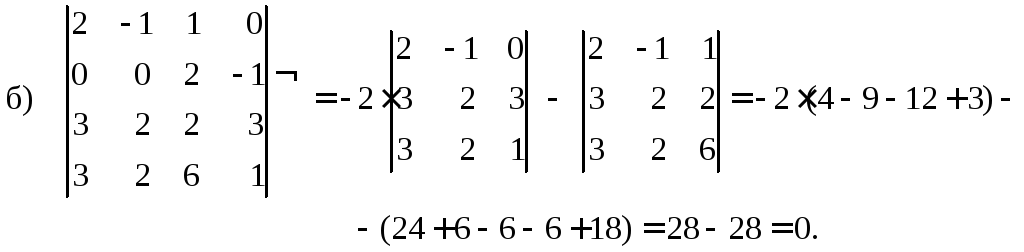
Példák 2.4. Számítsa ki a determinánsokat úgy, hogy először bontsa ki őket bármelyik sorban vagy oszlopban. Általában ilyen esetekben azt az oszlopot vagy sort kell kiválasztani, amelyben a legtöbb nulla található. A kiválasztott sort vagy oszlopot nyíl jelzi.

2.5. A determinánsok alapvető tulajdonságai
A determinánst bármely sorban vagy oszlopban kiterjesztve n determinánst kapunk ( n–1)-edik rend. Ezután mindegyik meghatározó ( n–1)-edik sorrend is felbontható determinánsok összegére ( n–2) sorrend. Ezt a folyamatot folytatva el lehet jutni az 1. rendű determinánsokhoz, pl. a mátrix azon elemeire, amelyek determinánsát számítjuk. Tehát a 2. rendű determinánsok kiszámításához két tag összegét kell kiszámítania, a 3. rendű determinánsokhoz - 6 tag összegét, a 4. rendű determinánsokhoz - 24 tagot. A kifejezések száma meredeken növekszik a determináns sorrendjének növekedésével. Ez azt jelenti, hogy a nagyon magas fokú determinánsok kiszámítása meglehetősen fáradságos feladattá válik, még egy számítógép erejét is meghaladja. A determinánsokat azonban más módon is ki lehet számítani, a determinánsok tulajdonságait felhasználva.
1. tulajdonság . A determináns nem változik, ha sorokat és oszlopokat cserélünk benne, pl. mátrix transzponálásakor:
 .
.
Ez a tulajdonság a determináns sorainak és oszlopainak egyenlőségét jelzi. Más szóval, egy determináns oszlopaira vonatkozó bármely állítás igaz a soraira, és fordítva.
2. tulajdonság . A determináns előjelet vált, ha két sort (oszlopot) felcserélünk.
Következmény . Ha a determinánsnak két egyforma sora (oszlopa) van, akkor egyenlő nullával.
3. tulajdonság . Bármely sor (oszlop) összes elemének közös tényezője kivehető a determináns előjeléből.
Például,

Következmény . Ha a determináns valamely sorának (oszlopának) minden eleme egyenlő nullával, akkor maga a determináns nulla.
4. tulajdonság . A determináns nem változik, ha az egyik sor (oszlop) elemeit hozzáadjuk egy másik sor (oszlop) elemeihez, megszorozva valamilyen számmal.
Például,

5. ingatlan . A mátrixszorzat determinánsa megegyezik a mátrixdeterminánsok szorzatával:
Praktikus munka
"Harmadrendű lineáris egyenletrendszerek megoldása Cramer módszerével"
A munka céljai:
bővítse az SLE megoldási módszereinek megértését és dolgozza ki az SLE Cramor módszerrel történő megoldásának algoritmusát;
a tanulók logikus gondolkodásának, a probléma racionális megoldásának képességének fejlesztése;
hogy a tanulókat döntésük meghozatalakor az írott matematikai beszéd pontosságára és kultúrájára neveljük.
Elméleti alapanyag.
Cramer módszere. Alkalmazás lineáris egyenletrendszerekhez.
Adott egy N lineáris algebrai egyenletből (SLAE) álló ismeretleneket tartalmazó rendszer, melynek együtthatói a mátrix elemei, szabad tagjai pedig a számok.
Az együtthatók melletti első index azt jelzi, hogy melyik egyenletben található az együttható, a második pedig azt, hogy az ismeretlenek közül melyikben található. 
Ha a mátrix determináns nem egyenlő nullával
akkor a lineáris algebrai egyenletrendszernek egyedi megoldása van. A lineáris algebrai egyenletrendszer megoldása egy olyan rendezett számhalmaz, amely a rendszer minden egyenletét helyes egyenlőséggé alakítja. Ha a rendszer összes egyenletének jobb oldala nulla, akkor az egyenletrendszert homogénnek nevezzük. Abban az esetben, ha ezek egy része nem nulla, nem egységes ![]() Ha egy lineáris algebrai egyenletrendszernek van legalább egy megoldása, akkor azt kompatibilisnek nevezzük, ellenkező esetben inkompatibilis. Ha a rendszer megoldása egyedi, akkor a lineáris egyenletrendszert határozottnak nevezzük. Abban az esetben, ha a kompatibilis rendszer megoldása nem egyedi, az egyenletrendszert határozatlannak nevezzük. Két lineáris egyenletrendszert nevezünk ekvivalensnek (vagy ekvivalensnek), ha az egyik rendszer minden megoldása a második megoldása, és fordítva. Egyenértékű (vagy ekvivalens) rendszereket ekvivalens transzformációkkal kapunk.
Ha egy lineáris algebrai egyenletrendszernek van legalább egy megoldása, akkor azt kompatibilisnek nevezzük, ellenkező esetben inkompatibilis. Ha a rendszer megoldása egyedi, akkor a lineáris egyenletrendszert határozottnak nevezzük. Abban az esetben, ha a kompatibilis rendszer megoldása nem egyedi, az egyenletrendszert határozatlannak nevezzük. Két lineáris egyenletrendszert nevezünk ekvivalensnek (vagy ekvivalensnek), ha az egyik rendszer minden megoldása a második megoldása, és fordítva. Egyenértékű (vagy ekvivalens) rendszereket ekvivalens transzformációkkal kapunk. 
Az SLAE egyenértékű transzformációi
1) egyenletek átrendezése;
2) egyenletek szorzása (vagy osztása) nem nulla számmal;
3) egy egyenlethez hozzáadunk egy másik egyenletet, megszorozva egy tetszőleges nem nulla számmal.
Az SLAE megoldása többféleképpen is megtalálható, például Cramer-képletekkel (Cramer-módszer)
Cramer tétele. Ha egy ismeretleneket tartalmazó lineáris algebrai egyenletrendszer determinánsa nem nulla, akkor ennek a rendszernek van egy egyedi megoldása, amelyet a Cramer-képletek találnak meg: ![]()
![]() - a -edik oszlop, szabad kifejezések oszlopának cseréjével képzett determinánsok.
- a -edik oszlop, szabad kifejezések oszlopának cseréjével képzett determinánsok.
Ha , és legalább az egyik nem nulla, akkor a SLAE-nek nincs megoldása. Ha ![]() , akkor a SLAE-nek számos megoldása van.
, akkor a SLAE-nek számos megoldása van.
Adott egy három lineáris egyenletrendszer három ismeretlennel. Oldja meg a rendszert Cramer módszerével
Megoldás. 
Keresse meg az ismeretlenek együtthatói mátrixának determinánsát!

Mivel , akkor az adott egyenletrendszer konzisztens és egyedi megoldása van. Számítsuk ki a determinánsokat:



Cramer képletei segítségével megtaláljuk az ismeretleneket
Így ![]() az egyetlen megoldás a rendszerre.
az egyetlen megoldás a rendszerre.
Adott egy négy lineáris algebrai egyenletrendszer. Oldja meg a rendszert Cramer módszerével.

Keressük meg az ismeretlenek együtthatói mátrixának determinánsát. Ehhez az első sorral bővítjük.


Keresse meg a determináns összetevőit:


Helyettesítsd be a talált értékeket a determinánsba
A determináns tehát az egyenletrendszer konzisztens és egyedi megoldása van. A determinánsokat a Cramer-képletekkel számítjuk ki:
Értékelési szempontok:
A munka "3"-ra kerül értékelésre, ha: az egyik rendszer teljesen és megfelelően önállóan megoldott.
A munka "4"-re kerül értékelésre, ha: bármely két rendszer teljesen és megfelelően önállóan megoldott.
A munka "5"-re kerül értékelésre, ha: három rendszer teljesen és helyesen van önállóan megoldva.
Cramer módszere a determinánsok felhasználásán alapul lineáris egyenletrendszerek megoldásában. Ez nagymértékben felgyorsítja a megoldási folyamatot.
A Cramer-módszerrel annyi lineáris egyenletből álló rendszert lehet megoldani, ahány egyenletben ismeretlen van. Ha a rendszer determinánsa nem egyenlő nullával, akkor Cramer módszere használható a megoldásban, ha egyenlő nullával, akkor nem. Ezenkívül a Cramer-módszer használható olyan lineáris egyenletrendszerek megoldására is, amelyek egyedi megoldással rendelkeznek.
Meghatározás. Az ismeretlenek együtthatóiból álló determinánst a rendszer determinánsának nevezzük, és (delta) jelöljük.
Meghatározók
úgy kapjuk meg, hogy a megfelelő ismeretleneknél lévő együtthatókat szabad kifejezésekkel helyettesítjük:
 ;
;
 .
.
Cramer tétele. Ha a rendszer determinánsa nem nulla, akkor a lineáris egyenletrendszernek egyetlen megoldása van, és az ismeretlen egyenlő a determinánsok arányával. A nevező a rendszer determinánsa, a számláló pedig az a determináns, amelyet a rendszer determinánsából kapunk úgy, hogy az együtthatókat az ismeretlennel szabad tagokkal helyettesítjük. Ez a tétel tetszőleges sorrendű lineáris egyenletrendszerre érvényes.
1. példa Oldja meg a lineáris egyenletrendszert:
Alapján Cramer tétele nekünk van:
Tehát a (2) rendszer megoldása:
online számológép, Cramer megoldási módszere.
Három eset a lineáris egyenletrendszerek megoldásában
Amint az ebből látszik Cramer tételei lineáris egyenletrendszer megoldása során három eset fordulhat elő:

Első eset: a lineáris egyenletrendszernek egyedi megoldása van
(a rendszer következetes és határozott)

Második eset: a lineáris egyenletrendszernek végtelen számú megoldása van
(a rendszer konzisztens és határozatlan)
** ![]() ,
,
azok. az ismeretlenek és a szabad tagok együtthatói arányosak.

Harmadik eset: a lineáris egyenletrendszernek nincs megoldása
(rendszer inkonzisztens)
Tehát a rendszer m lineáris egyenletek -val n változókat nevezzük összeegyeztethetetlen ha nincs megoldása, és közös ha van legalább egy megoldása. Olyan közös egyenletrendszert nevezünk, amelynek csak egy megoldása van bizonyos, és több bizonytalan.
Példák lineáris egyenletrendszerek megoldására Cramer módszerrel
Hagyja a rendszert
 .
.
Cramer tétele alapján
………….
,
ahol  -
-
rendszerazonosító. A fennmaradó determinánsokat úgy kapjuk meg, hogy az oszlopot a megfelelő változó (ismeretlen) együtthatóival szabad tagokkal helyettesítjük:


2. példa
 .
.

Ezért a rendszer határozott. A megoldás megtalálásához kiszámítjuk a determinánsokat


A Cramer-képletekkel a következőket találjuk:
![]()
Tehát (1; 0; -1) az egyetlen megoldás a rendszerre.
A 3 X 3 és 4 X 4 egyenletrendszerek megoldásainak ellenőrzéséhez használhatja az online számológépet, a Cramer megoldási módszert.
Ha a lineáris egyenletrendszerben egy vagy több egyenletben nincsenek változók, akkor a determinánsban a hozzájuk tartozó elemek nullával egyenlők! Ez a következő példa.
3. példa Oldja meg a lineáris egyenletrendszert Cramer módszerével:
 .
.
Megoldás. Megtaláljuk a rendszer meghatározóját:

Nézze meg figyelmesen az egyenletrendszert és a rendszer determinánsát, és ismételje meg a választ arra a kérdésre, hogy mely esetekben egyenlő a determináns egy vagy több eleme nullával! Tehát a determináns nem egyenlő nullával, ezért a rendszer határozott. A megoldás megtalálásához kiszámítjuk az ismeretlenek determinánsait


A Cramer-képletekkel a következőket találjuk:
Tehát a rendszer megoldása (2; -1; 1).
A 3 X 3 és 4 X 4 egyenletrendszerek megoldásainak ellenőrzéséhez használhatja az online számológépet, a Cramer megoldási módszert.
Lap teteje
Továbbra is közösen oldjuk meg a rendszereket a Cramer módszerrel
Mint már említettük, ha a rendszer determinánsa egyenlő nullával, és az ismeretlenek determinánsai nem egyenlőek nullával, akkor a rendszer inkonzisztens, vagyis nincs megoldása. Szemléltessük a következő példával.
6. példa Oldja meg a lineáris egyenletrendszert Cramer módszerével:

Megoldás. Megtaláljuk a rendszer meghatározóját:
A rendszer determinánsa nulla, ezért a lineáris egyenletrendszer vagy inkonzisztens és határozott, vagy inkonzisztens, azaz nincs megoldása. Az egyértelműség kedvéért kiszámítjuk az ismeretlenek meghatározóit


Az ismeretlenek determinánsai nem egyenlőek nullával, ezért a rendszer inkonzisztens, vagyis nincs megoldása.
A 3 X 3 és 4 X 4 egyenletrendszerek megoldásainak ellenőrzéséhez használhatja az online számológépet, a Cramer megoldási módszert.
A lineáris egyenletrendszerekkel kapcsolatos feladatokban vannak olyanok is, ahol a változókat jelölő betűk mellett más betűk is vannak. Ezek a betűk valamilyen számot jelölnek, leggyakrabban valós számot. A gyakorlatban az ilyen egyenletek és egyenletrendszerek problémákhoz vezetnek bármely jelenség és objektum általános tulajdonságainak megtalálása során. Vagyis feltaláltál valami új anyagot vagy eszközt, és annak leírásához, amelyek mérettől, példányszámtól függetlenül általánosak, meg kell oldanod egy lineáris egyenletrendszert, ahol a változókhoz tartozó együtthatók helyett betűk vannak. Nem kell messzire keresni a példákat.
A következő példa egy hasonló problémára vonatkozik, csak a valós számot jelölő egyenletek, változók és betűk száma nő.
8. példa Oldja meg a lineáris egyenletrendszert Cramer módszerével:
Megoldás. Megtaláljuk a rendszer meghatározóját:
Determinánsok keresése ismeretlenekre

AZ RCHB VÉDELEM KATONAI EGYETEME KOSTROMA ÁG
"Parancs és irányítás automatizálása" osztály
Csak tanároknak
"Helyeslem"
9. számú osztályvezető
YAKOVLEV A.B. ezredes
"____" __________________ 2004
A.I. Smirnova docens
"MEGHATÁROZÓK.
LINEÁRIS EGYENLETRENDSZER MEGOLDÁSA"
ELŐADÁS 2/1
9. számú osztály ülésén tárgyalt
"____" ___________ 2004
___________ számú jegyzőkönyv
Kostroma, 2004.
Bevezetés
1. Másod- és harmadrend meghatározói.
2. Determinánsok tulajdonságai. Dekompozíciós tétel.
3. Cramer-tétel.
Következtetés
Irodalom
1. V.E. Schneider et al., A Short Course in Higher Mathematics, I. kötet, Ch. 2, 1. tétel.
2. V.S. Shchipachev, Felső matematika, 10. fejezet, 2. o.
BEVEZETÉS
Az előadás a másod- és harmadrendű determinánsokkal, azok tulajdonságaival foglalkozik. Valamint a Cramer-tétel, amely lehetővé teszi lineáris egyenletrendszerek determinánsok felhasználásával történő megoldását. A determinánsokat később a "Vektoralgebra" témakörben is használjuk a vektorok keresztszorzatának kiszámításakor.
1. tanulmányi kérdés A MÁSODIK ÉS HARMADIK MINŐSÍTŐI
RENDELÉS
Tekintsünk egy táblázatot az űrlap négy számából
A táblázatban szereplő számokat két indexű betű jelöli. Az első index a sorszámot, a második az oszlop számát jelöli.
MEGHATÁROZÁS 1.Másodrendű determináns hívottkifejezéskedves:
(1)Számok a 11, …, a 22-t a determináns elemeinek nevezzük.
Elemek által alkotott átló a 11 ; a A 22-t főnek, az elemek által alkotott átlónak nevezzük a 12 ; a 21 - az oldalán.
Így a másodrendű determináns egyenlő a fő- és másodlagos átló elemeinek szorzatai közötti különbséggel.
Vegye figyelembe, hogy a válasz egy szám.
PÉLDÁK. Kiszámítja:
Tekintsünk most egy kilenc számból álló táblázatot, amely három sorban és három oszlopban van írva:
2. MEGHATÁROZÁS. Harmadik rendű determináns a forma kifejezésének nevezzük:
Elemek a 11; a 22 ; a 33 - alkotják a főátlót.
Számok a 13; a 22 ; a 31 - oldalátlót alkotnak.
Vizsgáljuk meg sematikusan, hogyan alakulnak ki a plusz és mínusz kifejezések:
" + " " – "A plusz tartalmazza: a főátlón lévő elemek szorzatát, a másik két tag a főátlóval párhuzamos alapokkal rendelkező háromszög csúcsaiban elhelyezkedő elemek szorzata.
A mínuszos kifejezéseket ugyanúgy képezzük a másodlagos átlóhoz képest.
Ezt a szabályt a harmadrendű determináns kiszámítására hívjuk
jobb
PÉLDÁK. Számítsd ki a háromszögek szabályával:
MEGJEGYZÉS. A determinánsokat determinánsoknak is nevezik.
2. tanulmányi kérdés A MEGHATÁROZÓ SZEREK TULAJDONSÁGAI.
KITERJESZTÉSI TÉTEL
1. tulajdonság. A determináns értéke nem változik, ha sorait felcseréljük a megfelelő oszlopokkal.
.Mindkét determinánst kibővítve meggyőződünk az egyenlőség érvényességéről.
Az 1. tulajdonság a determináns sorainak és oszlopainak egyenlőségét állítja be. Ezért a determináns minden további tulajdonsága sorokra és oszlopokra egyaránt megfogalmazódik.
2. tulajdonság. Ha két sort (vagy oszlopot) felcserélünk, a determináns előjelet vált az ellenkezőjére, megőrzi az abszolút értéket.
.3. tulajdonság. Sorelemek közös szorzója(vagy oszlop)kivehető a determináns jeléből.
.4. tulajdonság. Ha a determinánsnak két egyforma sora (vagy oszlopa) van, akkor az egyenlő nullával.
Ez a tulajdonság közvetlen ellenőrzéssel igazolható, vagy a 2. tulajdonság használható.
Jelölje a determinánst D-vel. Ha két azonos első és második sort felcserélünk, az nem változik, a második tulajdonságnál pedig előjelet kell váltania, azaz.
D = - DÞ 2 D = 0 ÞD = 0.
5. ingatlan. Ha valamilyen karakterlánc minden eleme(vagy oszlop)nullák, akkor a determináns nulla.
Ez a tulajdonság a 3. tulajdonság speciális esetének tekinthető
6. ingatlan. Ha két sor elemei(vagy oszlopok)determináns arányos, akkor a determináns nulla.
.Igazolható közvetlen ellenőrzéssel vagy a 3. és 4. tulajdonság felhasználásával.
7. ingatlan. A determináns értéke nem változik, ha bármely sor (vagy oszlop) elemeit hozzáadjuk egy másik sor (vagy oszlop) megfelelő elemeihez, megszorozva ugyanazzal a számmal.
.Ezt közvetlen ellenőrzés bizonyítja.
Ezen tulajdonságok használata bizonyos esetekben megkönnyítheti a determinánsok kiszámításának folyamatát, különösen a harmadrendűek esetében.
A következőkhöz szükségünk van a moll és az algebrai komplement fogalmára. Tekintsük ezeket a fogalmakat a harmadik sorrend meghatározásához.
3. MEGHATÁROZÁS. Kisebb Egy harmadrendű determináns adott elemének másodrendű determinánsának nevezzük, amelyet egy adott elemből úgy kapunk, hogy töröljük azt a sort és oszlopot, amelynek metszéspontjában az adott elem áll.
Elem minor aénj jelöljük Ménj. Tehát az elemhez a 11 kiskorú
Ezt a harmadrendű determináns első sorának és első oszlopának törlésével kapjuk meg.
4. MEGHATÁROZÁS. A determináns elem algebrai komplementere nevezzük kiskorúnak szorozva(-1)k, aholk- azon sor- és oszlopszámok összege, amelyek metszéspontjában az adott elem található.
Algebrai elemösszeadás aénj jelöljük DEénj.
Ily módon DEénj =
.Írjuk fel az elemek algebrai komplementereit a 11 és a 12.
. .Hasznos megjegyezni a szabályt: egy determináns elemének algebrai komplementere egyenlő az előjeles molljával egy plusz, ha annak a sornak és oszlopnak az összege, amelyben az elem található, még,és jellel mínusz ha ez az összeg páratlan.
PÉLDA. Keresse meg a determináns első sorának elemeinek mollokat és algebrai komplementereket:
Nyilvánvaló, hogy a mollok és az algebrai kiegészítések csak előjelben különbözhetnek egymástól.
Tekintsünk bizonyítás nélkül egy fontos tételt - a determináns kiterjesztési tétel.
KITERJESZTÉSI TÉTEL
A determináns egyenlő bármely sor vagy oszlop elemeinek és algebrai komplementereik szorzatának összegével.
Ezzel a tétellel az első sorba írjuk a harmadrendű determináns kiterjesztését.
.Kiterjesztett:
.Az utolsó képlet használható főként a harmadrendű determináns kiszámításakor.
A dekompozíciós tétel lehetővé teszi, hogy a harmadrendű determináns számítását három másodrendű determináns számítására redukáljuk.
A dekompozíciós tétel egy második módszert ad a harmadrendű determinánsok kiszámítására.
PÉLDÁK. Számítsa ki a determinánst a kiterjesztési tétel segítségével!
A lineáris algebrai egyenletrendszerek (SLAE) megoldása kétségtelenül a lineáris algebra tanfolyam legfontosabb témája. A matematika minden ágából származó feladatok nagy száma a lineáris egyenletrendszerek megoldására redukálódik. Ezek a tényezők magyarázzák a cikk létrehozásának okát. A cikk anyaga úgy van megválogatva és felépített, hogy segítségével Ön is meg tudja tenni
- válassza ki a lineáris algebrai egyenletrendszer optimális megoldási módját,
- tanulmányozza a választott módszer elméletét,
- oldja meg lineáris egyenletrendszerét, miután részletesen átgondolta a tipikus példák és problémák megoldását.
A cikk anyagának rövid ismertetése.
Először megadjuk az összes szükséges definíciót, fogalmat, és bevezetünk néhány jelölést.
Ezután megvizsgáljuk azokat a lineáris algebrai egyenletrendszerek megoldási módszereit, amelyekben az egyenletek száma megegyezik az ismeretlen változók számával, és amelyeknek egyedi megoldása van. Először a Cramer-módszerre összpontosítunk, másodszor bemutatjuk az ilyen egyenletrendszerek megoldására szolgáló mátrixmódszert, harmadszor pedig a Gauss-módszert (az ismeretlen változók egymást követő kiküszöbölésének módszerét) elemezzük. Az elmélet megszilárdítása érdekében minden bizonnyal számos SLAE-t fogunk különféle módon megoldani.
Ezt követően olyan általános alakú lineáris algebrai egyenletrendszerek megoldására térünk át, amelyekben az egyenletek száma nem esik egybe az ismeretlen változók számával, vagy a rendszer főmátrixa degenerált. Megfogalmazzuk a Kronecker-Capelli tételt, amely lehetővé teszi az SLAE-k kompatibilitásának megállapítását. Elemezzük a rendszerek megoldását (kompatibilitásuk esetén) egy mátrix base moll fogalmával. Megfontoljuk a Gauss-módszert is, és részletesen leírjuk a példák megoldásait.
Ügyeljen arra, hogy foglalkozzon a homogén és inhomogén lineáris algebrai egyenletrendszerek általános megoldásának szerkezetével. Adjuk meg az alapvető megoldási rendszer fogalmát, és mutassuk meg, hogyan íródik le az SLAE általános megoldása az alapvető megoldási rendszer vektorai segítségével. A jobb megértés érdekében nézzünk meg néhány példát.
Végezetül figyelembe vesszük a lineárisra redukált egyenletrendszereket, valamint különféle problémákat, amelyek megoldásában SLAE-k merülnek fel.
Oldalnavigáció.
Definíciók, fogalmak, megnevezések.
P lineáris algebrai egyenletekből álló rendszereket fogunk figyelembe venni n ismeretlen változóval (p egyenlő lehet n ) alakú
Ismeretlen változók, - együtthatók (néhány valós vagy komplex szám), - szabad tagok (valós vagy komplex számok is).
A SLAE ezen formáját hívják koordináta.
NÁL NÉL mátrix forma ennek az egyenletrendszernek az alakja,
ahol  - a rendszer főmátrixa, - az ismeretlen változók mátrixoszlopa, - a szabad tagok mátrixoszlopa.
- a rendszer főmátrixa, - az ismeretlen változók mátrixoszlopa, - a szabad tagok mátrixoszlopa.
Ha az A mátrixhoz (n + 1)-edik oszlopként hozzáadjuk a szabad tagok mátrixoszlopát, akkor megkapjuk az ún. kiterjesztett mátrix lineáris egyenletrendszerek. Általában a kibővített mátrixot T betűvel jelöljük, és a szabad tagok oszlopát függőleges vonal választja el a többi oszloptól, azaz 
Lineáris algebrai egyenletrendszer megoldásával Ismeretlen változók értékkészletének nevezzük, amely a rendszer összes egyenletét azonossággá alakítja. Az ismeretlen változók adott értékeihez tartozó mátrixegyenlet is azonossággá alakul.
Ha egy egyenletrendszernek van legalább egy megoldása, akkor azt ún közös.
Ha az egyenletrendszernek nincs megoldása, akkor ún összeegyeztethetetlen.
Ha egy SLAE-nek egyedi megoldása van, akkor azt hívják bizonyos; ha több megoldás létezik, akkor - bizonytalan.
Ha a rendszer összes egyenletének szabad tagja nulla ![]() , akkor a rendszer meghívásra kerül homogén, másképp - heterogén.
, akkor a rendszer meghívásra kerül homogén, másképp - heterogén.
Elemi lineáris algebrai egyenletrendszerek megoldása.
Ha a rendszeregyenletek száma megegyezik az ismeretlen változók számával, és főmátrixának determinánsa nem egyenlő nullával, akkor az ilyen SLAE-ket hívjuk. alapvető. Az ilyen egyenletrendszereknek egyedi megoldásuk van, és homogén rendszer esetén minden ismeretlen változó nullával egyenlő.
A középiskolában kezdtük el tanulni az ilyen SLAE-t. Megoldásukkor vettünk egy egyenletet, egy ismeretlen változót a többiekkel kifejeztünk és behelyettesítettünk a többi egyenletbe, majd vettük a következő egyenletet, kifejeztük a következő ismeretlen változót és behelyettesítettük más egyenletekkel stb. Vagy az összeadás módszerét alkalmazták, vagyis két vagy több egyenletet adtak hozzá néhány ismeretlen változó kiküszöbölésére. Ezekkel a módszerekkel nem foglalkozunk részletesen, mivel ezek lényegében a Gauss-módszer módosításai.
Az elemi lineáris egyenletrendszerek megoldásának fő módszerei a Cramer-módszer, a mátrix-módszer és a Gauss-módszer. Tegyük rendbe őket.
Lineáris egyenletrendszerek megoldása Cramer módszerével.
Meg kell oldanunk egy lineáris algebrai egyenletrendszert 
amelyben az egyenletek száma egyenlő az ismeretlen változók számával és a rendszer főmátrixának determinánsa nullától eltérő, azaz.
Legyen a rendszer főmátrixának determinánsa, és ![]() olyan mátrixok determinánsai, amelyeket A-ból cserével kapunk 1., 2., …, n-edik oszlop, illetve a szabad tagok oszlopa:
olyan mátrixok determinánsai, amelyeket A-ból cserével kapunk 1., 2., …, n-edik oszlop, illetve a szabad tagok oszlopa: 
Ilyen jelöléssel az ismeretlen változókat a Cramer-féle as módszer képleteivel számítjuk ki  . Így találjuk meg a Cramer-módszerrel egy lineáris algebrai egyenletrendszer megoldását.
. Így találjuk meg a Cramer-módszerrel egy lineáris algebrai egyenletrendszer megoldását.
Példa.
Cramer módszer  .
.
Megoldás.
A rendszer fő mátrixának van formája  . Számítsa ki a meghatározóját (ha szükséges, lásd a cikket):
. Számítsa ki a meghatározóját (ha szükséges, lásd a cikket): 
Mivel a rendszer főmátrixának determinánsa nem nulla, a rendszernek van egy egyedi megoldása, amelyet Cramer módszerével találhatunk meg.
Állítsa össze és számítsa ki a szükséges determinánsokat! ![]() (a determinánst úgy kapjuk meg, hogy az A mátrix első oszlopát szabad tagokból álló oszlopra cseréljük, a determinánst - ha a második oszlopot szabad tagokból álló oszlopra cseréljük, - az A mátrix harmadik oszlopát szabad tagokból álló oszlopra cseréljük ):
(a determinánst úgy kapjuk meg, hogy az A mátrix első oszlopát szabad tagokból álló oszlopra cseréljük, a determinánst - ha a második oszlopot szabad tagokból álló oszlopra cseréljük, - az A mátrix harmadik oszlopát szabad tagokból álló oszlopra cseréljük ): 
Ismeretlen változók keresése képletekkel  :
:
Válasz:
A Cramer-módszer fő hátránya (ha hátránynak nevezhető) a determinánsok kiszámításának bonyolultsága, ha a rendszeregyenletek száma több mint három.
Lineáris algebrai egyenletrendszerek megoldása mátrix módszerrel (inverz mátrix segítségével).
Adjuk meg a lineáris algebrai egyenletrendszert mátrix formában, ahol az A mátrix mérete n x n, determinánsa pedig nem nulla.
Mivel , akkor az A mátrix invertálható, azaz van inverz mátrix. Ha az egyenlőség mindkét részét megszorozzuk a bal oldalon, akkor egy képletet kapunk az ismeretlen változók oszlopmátrixának megkeresésére. Így megkaptuk a lineáris algebrai egyenletrendszer mátrix módszerrel történő megoldását.
Példa.
Lineáris egyenletrendszer megoldása mátrix módszer.
Megoldás.
Írjuk át az egyenletrendszert mátrix alakban: 
Mert
akkor az SLAE mátrix módszerrel megoldható. Az inverz mátrix segítségével ennek a rendszernek a megoldása a következőképpen kereshető  .
.
Építsünk inverz mátrixot az A mátrix elemeinek algebrai komplementereinek mátrixával (ha szükséges, lásd a cikket): 
Ki kell számítani - az ismeretlen változók mátrixát az inverz mátrix szorzásával  a szabad tagok mátrixoszlopán (ha szükséges, lásd a cikket):
a szabad tagok mátrixoszlopán (ha szükséges, lásd a cikket): 
Válasz:
 vagy más jelöléssel x 1 = 4, x 2 = 0, x 3 = -1.
vagy más jelöléssel x 1 = 4, x 2 = 0, x 3 = -1.
A lineáris algebrai egyenletrendszerek mátrix módszerrel történő megoldásának fő problémája az inverz mátrix megtalálásának bonyolultsága, különösen a harmadiknál magasabb rendű négyzetmátrixok esetében.
Lineáris egyenletrendszerek megoldása Gauss módszerrel.
Tegyük fel, hogy megoldást kell találnunk egy n lineáris egyenletrendszerre n ismeretlen változóval 
amelynek főmátrixának determinánsa nullától eltérő.
A Gauss-módszer lényege ismeretlen változók egymást követő kizárásából áll: először x 1 ki van zárva a rendszer összes egyenletéből, a másodiktól kezdve, majd x 2 ki van zárva minden egyenletből, a harmadiktól kezdve, és így tovább, amíg csak az ismeretlen változóig x n az utolsó egyenletben marad. A rendszer egyenleteinek egy ilyen transzformációját az ismeretlen változók egymás utáni kiküszöbölésére az ún. közvetlen Gauss-módszer. A Gauss-módszer előrefutásának befejezése után az utolsó egyenletből x n, az utolsó előtti egyenletből x n-1 kerül kiszámításra ezzel az értékkel, és így tovább, x 1 az első egyenletből. Az ismeretlen változók kiszámításának folyamatát, amikor a rendszer utolsó egyenletéből az első egyenletbe lépünk, az ún. fordított Gauss-módszer.
Röviden írjuk le az ismeretlen változók kiküszöbölésére szolgáló algoritmust.
Feltételezzük, hogy , mivel ezt mindig elérhetjük a rendszer egyenleteinek átrendezésével. Az ismeretlen x 1 változót kizárjuk a rendszer összes egyenletéből, a másodiktól kezdve. Ehhez adjuk hozzá az első egyenletet szorozva a rendszer második egyenletéhez, adjuk hozzá az első szorzatot a harmadik egyenlethez, és így tovább, adjuk hozzá az első egyenletet szorozva az n-edik egyenlethez. Az egyenletrendszer az ilyen transzformációk után a következő alakot veszi fel 
hol egy  .
.
Ugyanerre az eredményre jutnánk, ha x 1-et más ismeretlen változókkal fejeznénk ki a rendszer első egyenletében, és a kapott kifejezést behelyettesítenénk az összes többi egyenletbe. Így az x 1 változót a másodiktól kezdve minden egyenletből kizárjuk.
Ezután hasonlóan járunk el, de csak a kapott rendszer egy részével, amelyet az ábrán jelölünk 
Ehhez adjuk hozzá a másodikat szorozva a rendszer harmadik egyenletéhez, adjuk hozzá a másodikat szorozva a negyedik egyenlethez, és így tovább, adjuk hozzá a másodikat szorozva az n-edik egyenlethez. Az egyenletrendszer az ilyen transzformációk után a következő alakot veszi fel 
hol egy  . Így az x 2 változót a harmadiktól kezdve minden egyenletből kizárjuk.
. Így az x 2 változót a harmadiktól kezdve minden egyenletből kizárjuk.
Ezután továbblépünk az ismeretlen x 3 kiküszöbölésére, miközben hasonlóan járunk el az ábrán jelölt rendszerrésszel 
Folytatjuk tehát a Gauss-módszer közvetlen menetét, amíg a rendszer fel nem veszi a formát 
Ettől a pillanattól kezdve elkezdjük a Gauss-módszer fordított lefolyását: az utolsó egyenletből kiszámoljuk x n-t, a kapott x n érték felhasználásával az utolsó előtti egyenletből x n-1-et, és így tovább, az első egyenletből x 1-et. egyenlet.
Példa.
Lineáris egyenletrendszer megoldása Gauss módszer.
Megoldás.
Zárjuk ki a rendszer második és harmadik egyenletéből az ismeretlen x 1 változót. Ehhez a második és a harmadik egyenlet mindkét részéhez hozzáadjuk az első egyenlet megfelelő részét, szorozva ezzel: 
Most kizárjuk az x 2-t a harmadik egyenletből úgy, hogy a bal és jobb részéhez hozzáadjuk a második egyenlet bal és jobb oldali részét, megszorozva: 
Ezen a Gauss-módszer előremenete befejeződött, elkezdjük a fordított pályát.
A kapott egyenletrendszer utolsó egyenletéből x 3-at találunk: 
A második egyenletből azt kapjuk, hogy .
Az első egyenletből megtaláljuk a fennmaradó ismeretlen változót, és ezzel teljessé válik a Gauss-módszer fordított menete.
Válasz:
X 1 \u003d 4, x 2 = 0, x 3 = -1.
Általános alakú lineáris algebrai egyenletrendszerek megoldása.
Általános esetben a p rendszer egyenleteinek száma nem esik egybe az n ismeretlen változók számával:
Az ilyen SLAE-knek nincs megoldása, egyetlen megoldásuk van, vagy végtelen sok megoldásuk van. Ez az állítás azokra az egyenletrendszerekre is vonatkozik, amelyek fő mátrixa négyzetes és degenerált.
Kronecker-Capelli tétel.
Mielőtt megoldást találnánk egy lineáris egyenletrendszerre, meg kell állapítani annak kompatibilitását. Arra a kérdésre, hogy mikor kompatibilis az SLAE, és mikor nem kompatibilis, megadja a választ Kronecker–Capelli tétel:
Ahhoz, hogy egy p egyenletrendszer n ismeretlennel (p egyenlő n-nel) konzisztens legyen, szükséges és elegendő, hogy a rendszer főmátrixának rangja egyenlő legyen a kiterjesztett mátrix rangjával, azaz Rank( A)=Ranghely(T) .
Példaként tekintsük a Kronecker-Cappelli tétel alkalmazását lineáris egyenletrendszer kompatibilitásának meghatározására.
Példa.
Nézze meg, hogy a lineáris egyenletrendszer rendelkezik-e  megoldásokat.
megoldásokat.
Megoldás.
 . Használjuk a kiskorúak határolásának módszerét. Másodrendű minor
. Használjuk a kiskorúak határolásának módszerét. Másodrendű minor  különbözik a nullától. Nézzük a körülötte lévő harmadrendű kiskorúakat:
különbözik a nullától. Nézzük a körülötte lévő harmadrendű kiskorúakat: 
Mivel az összes szomszédos harmadrendű kiskorú nulla, a főmátrix rangja kettő.
Viszont a kiterjesztett mátrix rangja  egyenlő hárommal, mivel a harmadrendű moll
egyenlő hárommal, mivel a harmadrendű moll 
különbözik a nullától.
Ily módon Rang(A) , ezért a Kronecker-Capelli-tétel szerint azt a következtetést vonhatjuk le, hogy az eredeti lineáris egyenletrendszer inkonzisztens.
Válasz:
Nincs megoldási rendszer.
Tehát megtanultuk megállapítani a rendszer inkonzisztenciáját a Kronecker-Capelli tétel segítségével.
De hogyan találjuk meg az SLAE megoldását, ha a kompatibilitás megvan?
Ehhez szükségünk van a mátrix base moll fogalmára és a mátrix rangjára vonatkozó tételre.
Az A mátrix nullától eltérő legmagasabb rendű mollját hívjuk alapvető.
A base moll definíciójából következik, hogy sorrendje megegyezik a mátrix rangjával. Egy nem nulla A mátrixhoz több alapmoll is lehet, mindig van egy alapmoll.
Vegyük például a mátrixot  .
.
Ennek a mátrixnak minden harmadrendű minorja nulla, mivel a mátrix harmadik sorának elemei az első és a második sor megfelelő elemeinek összege.
A következő másodrendű minorok alapvetőek, mivel nem nullák 
Kiskorúak  nem alapvetőek, mivel egyenlők nullával.
nem alapvetőek, mivel egyenlők nullával.
Mátrix rangtétel.
Ha egy p-rendű mátrix rangja r, akkor a mátrix sorainak (és oszlopainak) minden olyan eleme, amely nem képezi a választott bázis-mollt, lineárisan a sorok (és oszlopok) megfelelő elemeivel van kifejezve. ), amelyek a minor alapját képezik.
Mit ad nekünk a mátrix rangtétel?
Ha a Kronecker-Capelli tétellel megállapítottuk a rendszer kompatibilitását, akkor a rendszer főmátrixának bármely alapmollját választjuk (sorrendje egyenlő r-vel), és kizárunk a rendszerből minden olyan egyenletet, amely nem alkotják a választott alapmollt. Az így kapott SLAE ekvivalens lesz az eredetivel, mivel az elvetett egyenletek továbbra is redundánsak (a mátrix rangtétel szerint a fennmaradó egyenletek lineáris kombinációja).
Ennek eredményeként a rendszer túlzott egyenleteinek elvetése után két eset lehetséges.
Ha a kapott rendszerben az r egyenletek száma megegyezik az ismeretlen változók számával, akkor ez határozott lesz, és az egyetlen megoldást a Cramer módszerrel, a mátrix módszerrel vagy a Gauss módszerrel találhatjuk meg.
Példa.
 .
.
Megoldás.
A rendszer főmátrixának rangja  egyenlő kettővel, mivel a másodrendű moll
egyenlő kettővel, mivel a másodrendű moll  különbözik a nullától. Kiterjesztett mátrix rang
különbözik a nullától. Kiterjesztett mátrix rang  is egyenlő kettővel, mivel a harmadrendű egyetlen moll egyenlő nullával
is egyenlő kettővel, mivel a harmadrendű egyetlen moll egyenlő nullával 
és a fent vizsgált másodrendű moll nullától eltérő. A Kronecker-Capelli tétel alapján megállapítható az eredeti lineáris egyenletrendszer kompatibilitása, mivel Rank(A)=Rank(T)=2 .
Alapnak kisebbet vesszük . Az első és a második egyenlet együtthatói alkotják: 
A rendszer harmadik egyenlete nem vesz részt az alapmoll kialakításában, ezért a mátrix rangtétel alapján kizárjuk a rendszerből: 
Így kaptunk egy elemi lineáris algebrai egyenletrendszert. Oldjuk meg Cramer módszerével: 
Válasz:
x 1 \u003d 1, x 2 = 2.
Ha az eredményül kapott SLAE-ben az r egyenletek száma kisebb, mint az n ismeretlen változók száma, akkor az alap-mollt alkotó tagokat az egyenletek bal oldali részeiben hagyjuk, a fennmaradó tagokat pedig átvisszük az egyenletek jobb oldali részébe. ellentétes előjelű rendszer.
Az egyenletek bal oldalán maradó ismeretlen változókat (r darab van belőlük) ún. fő-.
A jobb oldalon kötött ismeretlen változókat (n - r van belőlük) hívjuk ingyenes.
Most feltételezzük, hogy a szabad ismeretlen változók tetszőleges értéket vehetnek fel, míg az r fő ismeretlen változót egyedi módon fejezzük ki a szabad ismeretlen változókkal. Kifejezésüket a kapott SLAE Cramer módszerrel, mátrix módszerrel vagy Gauss módszerrel történő megoldásával találhatjuk meg.
Vegyünk egy példát.
Példa.
Lineáris algebrai egyenletrendszer megoldása  .
.
Megoldás.
Keresse meg a rendszer főmátrixának rangját!  határos kiskorúak módszerével. Vegyünk egy 1 1 = 1-et nem nulla elsőrendű mollnak. Kezdjünk el keresni egy nem nulla másodrendű mollot, amely körülveszi ezt a minort:
határos kiskorúak módszerével. Vegyünk egy 1 1 = 1-et nem nulla elsőrendű mollnak. Kezdjünk el keresni egy nem nulla másodrendű mollot, amely körülveszi ezt a minort: 
Így találtunk egy nem nulla másodrendű mollot. Kezdjük el keresni egy nem nulla határos harmadrendű mollot: 
Így a fő mátrix rangja három. A kiterjesztett mátrix rangja szintén három, vagyis a rendszer konzisztens.
A talált, harmadrendű nem nulla moll alapnak számít.
Az érthetőség kedvéért bemutatjuk azokat az elemeket, amelyek a minor alapját képezik: 
Az alapmollban részt vevő kifejezéseket a rendszer egyenletek bal oldalán hagyjuk, a többit pedig ellentétes előjellel a jobb oldalra helyezzük át: 
A szabad ismeretlen változóknak x 2 és x 5 tetszőleges értéket adunk, vagyis veszünk ![]() , ahol tetszőleges számok vannak. Ebben az esetben a SLAE a formát veszi fel
, ahol tetszőleges számok vannak. Ebben az esetben a SLAE a formát veszi fel 
A kapott elemi lineáris algebrai egyenletrendszert Cramer módszerrel oldjuk meg: 
Következésképpen, .
A válaszban ne felejtse el megadni a szabad ismeretlen változókat.
Válasz:
Hol vannak tetszőleges számok.
Összesít.
Egy általános formájú lineáris algebrai egyenletrendszer megoldásához először a Kronecker-Capelli-tétel segítségével megtudjuk annak kompatibilitását. Ha a fő mátrix rangja nem egyenlő a kiterjesztett mátrix rangjával, akkor arra a következtetésre jutunk, hogy a rendszer inkonzisztens.
Ha a főmátrix rangja megegyezik a kiterjesztett mátrix rangjával, akkor az alapmollt választjuk, és elvetjük a rendszer azon egyenleteit, amelyek nem vesznek részt a választott alapmoll kialakításában.
Ha a base minor sorrendje megegyezik az ismeretlen változók számával, akkor az SLAE-nek van egy egyedi megoldása, amely bármely általunk ismert módszerrel megtalálható.
Ha az alapmoll sorrendje kisebb, mint az ismeretlen változók száma, akkor a fő ismeretlen változókkal rendelkező tagokat a rendszer egyenleteinek bal oldalán hagyjuk, a fennmaradó tagokat áthelyezzük a jobb oldalra, és tetszőleges értékeket adunk hozzá. a szabad ismeretlen változókhoz. A kapott lineáris egyenletrendszerből a fő ismeretlen változókat Cramer módszerrel, mátrix módszerrel vagy Gauss módszerrel találjuk meg.
Gauss-módszer általános alakú lineáris algebrai egyenletrendszerek megoldására.
A Gauss-módszerrel bármilyen típusú lineáris algebrai egyenletrendszer megoldható anélkül, hogy előzetes kompatibilitási vizsgálatokat végeznénk. Az ismeretlen változók egymás utáni kiküszöbölésének folyamata lehetővé teszi mind az SLAE kompatibilitására, mind inkonzisztenciájára vonatkozó következtetések levonását, és ha létezik megoldás, akkor azt megtalálni.
A számítási munka szempontjából a Gauss-módszer előnyösebb.
Részletes leírását és elemzett példáit lásd a Gauss-módszer általános alakú lineáris algebrai egyenletrendszerek megoldására című cikkben.
Homogén és inhomogén lineáris algebrai rendszerek általános megoldásának rögzítése az alapvető megoldási rendszer vektoraival.
Ebben a részben a végtelen számú megoldással rendelkező lineáris algebrai egyenletek együttes homogén és inhomogén rendszereire összpontosítunk.
Először foglalkozzunk a homogén rendszerekkel.
Alapvető döntési rendszer Egy p lineáris algebrai egyenletekből álló, n ismeretlen változós homogén rendszer ennek a rendszernek (n – r) lineárisan független megoldásainak halmaza, ahol r a rendszer főmátrixának alapmoll sorrendje.
Ha egy homogén SLAE lineárisan független megoldásait X (1) , X (2) , …, X (n-r) (X (1) , X (2) , …, X (n-r) mátrixoszlopoknak jelöljük 1 ) , akkor ennek a homogén rendszernek az általános megoldását a megoldások alaprendszerének vektorainak lineáris kombinációjaként ábrázoljuk tetszőleges állandó együtthatóval С 1 , С 2 , …, С (n-r), azaz .
Mit jelent a homogén lineáris algebrai egyenletrendszer (oroslau) általános megoldása?
A jelentés egyszerű: a képlet megadja az eredeti SLAE összes lehetséges megoldását, vagyis a C 1 , C 2 , ..., C (n-r) tetszőleges konstansok értékeinek tetszőleges halmazát figyelembe véve a képlet szerint az eredeti homogén SLAE egyik megoldását kapja majd.
Így, ha találunk egy alapvető megoldási rendszert, akkor ennek a homogén SLAE-nek minden megoldását beállíthatjuk .
Mutassuk meg a homogén SLAE alapvető megoldási rendszerének felépítésének folyamatát.
Az eredeti lineáris egyenletrendszer alapmollját választjuk, minden más egyenletet kizárunk a rendszerből, és az ellentétes előjelű rendszer egyenleteinek jobb oldalára visszük át az összes szabad ismeretlen változót tartalmazó tagot. Adjuk meg a szabad ismeretlen változóknak az 1,0,0,…,0 értékeket, és számítsuk ki a fő ismeretleneket úgy, hogy a kapott elemi lineáris egyenletrendszert bármilyen módon, például Cramer-módszerrel megoldjuk. Így X (1) lesz – az alaprendszer első megoldása. Ha a szabad ismeretleneknek megadjuk a 0,1,0,0,…,0 értékeket és kiszámítjuk a fő ismeretleneket, akkor X (2)-t kapunk. Stb. Ha a szabad ismeretlen változóknak 0,0,…,0,1 értékeket adunk, és kiszámítjuk a fő ismeretleneket, akkor X (n-r) -t kapunk. Így épül fel a homogén SLAE alapvető megoldási rendszere és írható fel általános megoldása a formába.
Inhomogén lineáris algebrai egyenletrendszerek esetén az általános megoldást a következőképpen ábrázoljuk
Nézzünk példákat.
Példa.
Keresse meg az alapvető megoldási rendszert és egy homogén lineáris algebrai egyenletrendszer általános megoldását  .
.
Megoldás.
A homogén lineáris egyenletrendszerek főmátrixának rangja mindig megegyezik a kiterjesztett mátrix rangjával. Határozzuk meg a főmátrix rangját a kiskorúak szegélyezésének módszerével. Elsőrendű nem nulla mollként a rendszer főmátrixának a 1 1 = 9 elemét vesszük. Keresse meg a másodrendű nem-nulla moll határvonalát: 
A nullától eltérő másodrendű moll található. Nézzük végig a vele határos harmadrendű kiskorúakat, keresve egy nem nulla egyet: 
A harmadik rendű összes szomszédos kiskorú nulla, ezért a fő és a kiterjesztett mátrix rangja kettő. Vegyük az alap minort. Az érthetőség kedvéért megjegyezzük a rendszer elemeit, amelyek azt alkotják: 
Az eredeti SLAE harmadik egyenlete nem vesz részt az alapmoll kialakításában, ezért kizárható: 
A fő ismeretleneket tartalmazó kifejezéseket az egyenletek jobb oldalán hagyjuk, a szabad ismeretleneket tartalmazó tagokat pedig átvisszük a jobb oldalra:
Alkossunk egy alapvető megoldási rendszert az eredeti homogén lineáris egyenletrendszerre. Ennek az SLAE-nek az alapvető megoldási rendszere két megoldásból áll, mivel az eredeti SLAE négy ismeretlen változót tartalmaz, az alapmoll sorrendje pedig kettő. Az X (1) megtalálásához a szabad ismeretlen változóknak x 2 \u003d 1, x 4 \u003d 0 értékeket adunk, majd az egyenletrendszerből megtaláljuk a fő ismeretleneket.  .
.
Oldjuk meg Cramer módszerével: 
Ily módon,.
Most építsük meg az X-et (2) . Ehhez a szabad ismeretlen változóknak x 2 \u003d 0, x 4 \u003d 1 értékeket adunk, majd a lineáris egyenletrendszerből megtaláljuk a fő ismeretleneket.  .
.
Használjuk ismét Cramer módszerét: 
Kapunk .
Így az alapvető megoldásrendszer két vektorát kaptuk, és most felírhatjuk egy homogén lineáris algebrai egyenletrendszer általános megoldását:  , ahol C 1 és C 2 tetszőleges számok., egyenlők nullával. Szintén a mollot vesszük alapnak, a harmadik egyenletet kizárjuk a rendszerből, és a szabad ismeretlennel rendelkező tagokat átvisszük a rendszeregyenletek jobb oldalára:
, ahol C 1 és C 2 tetszőleges számok., egyenlők nullával. Szintén a mollot vesszük alapnak, a harmadik egyenletet kizárjuk a rendszerből, és a szabad ismeretlennel rendelkező tagokat átvisszük a rendszeregyenletek jobb oldalára: 
A kereséshez a szabad ismeretlen változóknak x 2 \u003d 0 és x 4 \u003d 0 értékeket adunk, majd az egyenletrendszer a következő alakot veszi fel  , amelyből a fő ismeretlen változókat a Cramer módszerrel megtaláljuk:
, amelyből a fő ismeretlen változókat a Cramer módszerrel megtaláljuk: 
Nekünk van  , Következésképpen
, Következésképpen 
ahol C 1 és C 2 tetszőleges számok.
Meg kell jegyezni, hogy egy határozatlan homogén lineáris algebrai egyenletrendszer megoldásai generálnak lineáris tér Megoldás.
Az ellipszoid kanonikus egyenlete egy derékszögű derékszögű koordinátarendszerben a következő alakú:  . Feladatunk az a , b és c paraméterek meghatározása. Mivel az ellipszoid áthalad az A, B és C pontokon, így ezek koordinátáinak behelyettesítésekor az ellipszoid kanonikus egyenletébe azonossággá kell alakulnia. Így három egyenletrendszert kapunk:
. Feladatunk az a , b és c paraméterek meghatározása. Mivel az ellipszoid áthalad az A, B és C pontokon, így ezek koordinátáinak behelyettesítésekor az ellipszoid kanonikus egyenletébe azonossággá kell alakulnia. Így három egyenletrendszert kapunk: 
Jelöli ![]() , akkor a rendszer lineáris algebrai egyenletrendszerré válik
, akkor a rendszer lineáris algebrai egyenletrendszerré válik  .
.
Számítsuk ki a rendszer főmátrixának determinánsát: 
Mivel ez nem nulla, a megoldást Cramer módszerével találhatjuk meg:
). Nyilvánvaló, hogy x = 0 és x = 1 ennek a polinomnak a gyökei. osztásból származó hányados ![]() a
a ![]() van . Így van egy dekompozíciónk, és az eredeti kifejezés felveszi a formáját
van . Így van egy dekompozíciónk, és az eredeti kifejezés felveszi a formáját  .
.
Használjuk a határozatlan együtthatók módszerét. 
A számlálók megfelelő együtthatóinak egyenlővé tételével egy lineáris algebrai egyenletrendszerhez jutunk  . Megoldása megadja a kívánt határozatlan A, B, C és D együtthatókat.
. Megoldása megadja a kívánt határozatlan A, B, C és D együtthatókat.
A rendszert Gauss módszerrel oldjuk meg: 
A Gauss-módszer fordított menetében D = 0, C = -2, B = 1, A = 1 .
Kapunk 
Válasz:
 .
.