चक्रीय घूर्णन आवृत्ति के सूत्र। शाफ्ट गति का निर्धारण। हाइड्रोम्यूजियम - आरपीएम भौतिकी में आरपीएम को कैसे परिभाषित किया जाता है
कभी-कभी, कारों के संबंध में, गणित और भौतिकी के प्रश्न सामने आते हैं। विशेष रूप से, इन मुद्दों में से एक कोणीय वेग है। यह तंत्र के संचालन और घुमावों के पारित होने दोनों से संबंधित है। आइए जानें कि इस मान को कैसे निर्धारित किया जाए, इसे किसमें मापा जाता है और यहां किन सूत्रों का उपयोग किया जाना चाहिए।
कोणीय वेग कैसे निर्धारित करें: यह मान क्या है?
भौतिक और गणितीय दृष्टिकोण से, इस मात्रा को निम्नानुसार परिभाषित किया जा सकता है: ये डेटा हैं जो दिखाते हैं कि एक निश्चित बिंदु कितनी तेजी से सर्कल के केंद्र के चारों ओर घूमता है जिसके साथ वह चलता है।
वीडियो देखो
यह प्रतीत होता है कि विशुद्ध रूप से सैद्धांतिक मूल्य कार के संचालन में काफी व्यावहारिक महत्व का है। यहां कुछ उदाहरण दिए जा रहे हैं:
- उन आंदोलनों को सही ढंग से सहसंबंधित करना आवश्यक है जिनके साथ पहिए मुड़ते समय घूमते हैं। प्रक्षेपवक्र के आंतरिक भाग के साथ चलने वाली कार के पहिये का कोणीय वेग बाहरी की तुलना में कम होना चाहिए।
- कार में क्रैंकशाफ्ट कितनी तेजी से घूमता है, इसकी गणना करना आवश्यक है।
- अंत में, कार स्वयं, एक मोड़ से गुजरती है, इसमें एक निश्चित मात्रा में आंदोलन पैरामीटर भी होते हैं - और व्यवहार में, ट्रैक पर कार की स्थिरता और रोलओवर की संभावना उन पर निर्भर करती है।
किसी बिंदु को किसी दिए गए त्रिज्या के वृत्त के चारों ओर घूमने में लगने वाले समय का सूत्र
कोणीय वेग की गणना करने के लिए, निम्न सूत्र का उपयोग किया जाता है:
= /∆t
- (पढ़ें "ओमेगा") - वास्तव में परिकलित मान।
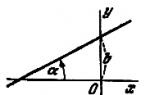
- ∆φ (उच्चारण "डेल्टा फी") रोटेशन का कोण है, माप के पहले और अंतिम क्षण में बिंदु की कोणीय स्थिति के बीच का अंतर।
- Δt
("डेल्टा ते" पढ़ें) - वह समय जिसके दौरान यह बहुत बदलाव हुआ। अधिक सटीक रूप से, चूंकि "डेल्टा" का अर्थ उस समय के मूल्यों के बीच का अंतर है जब माप शुरू किया गया था और जब यह समाप्त हो गया था।
कोणीय वेग के लिए उपरोक्त सूत्र केवल सामान्य मामलों में लागू होता है। जहां हम समान रूप से घूमने वाली वस्तुओं के बारे में बात कर रहे हैं या किसी हिस्से की सतह पर एक बिंदु की गति, त्रिज्या और घूर्णन के समय के बीच संबंध के बारे में बात कर रहे हैं, वहां अन्य संबंधों और विधियों का उपयोग करना आवश्यक है। विशेष रूप से, रोटेशन आवृत्ति सूत्र की यहां पहले से ही आवश्यकता होगी।
कोणीय वेग को विभिन्न इकाइयों में मापा जाता है। सिद्धांत रूप में, रेड/एस (प्रति सेकंड रेडियन) या डिग्री प्रति सेकंड अक्सर उपयोग किया जाता है। हालाँकि, यह मान व्यवहार में बहुत कम है और इसका उपयोग केवल डिज़ाइन कार्य में किया जा सकता है। व्यवहार में, यह प्रति सेकंड क्रांतियों में अधिक मापा जाता है (या मिनट, अगर हम धीमी प्रक्रियाओं के बारे में बात कर रहे हैं)। इस संबंध में, यह रोटेशन की आवृत्ति के करीब है।
रोटेशन का कोण और क्रांति की अवधि
रोटेशन के कोण की तुलना में बहुत अधिक सामान्य रोटेशन आवृत्ति है, जो इंगित करता है कि एक वस्तु किसी निश्चित समय में कितनी चक्कर लगाती है। तथ्य यह है कि गणना के लिए उपयोग किया जाने वाला रेडियन सर्कल में कोण होता है जब चाप की लंबाई त्रिज्या के बराबर होती है। तदनुसार, पूरे वृत्त में 2 रेडियन हैं। संख्या अपरिमेय है, और इसे दशमलव या साधारण भिन्न तक कम नहीं किया जा सकता है। इसलिए, यदि एक समान घूर्णन होता है, तो इसे आवृत्ति में गिनना आसान होता है। इसे आरपीएम में मापा जाता है - प्रति मिनट क्रांतियाँ।
यदि मामला लंबी अवधि से संबंधित नहीं है, लेकिन केवल उसी के दौरान एक क्रांति होती है, तो यहां संचलन की अवधि की अवधारणा का उपयोग किया जाता है। यह दिखाता है कि एक गोलाकार गति कितनी तेजी से होती है। यहां माप की इकाई दूसरी है।
कोणीय वेग और घूर्णी गति या क्रांति अवधि के बीच संबंध निम्नलिखित सूत्रों द्वारा दिखाया गया है:
= 2 / टी = 2 *च,
- rad/s में कोणीय वेग है;
- टी परिसंचरण अवधि है;
- f घूर्णन आवृत्ति है।
आप अनुपात के नियम का उपयोग करके इन तीनों में से कोई भी मान दूसरे से प्राप्त कर सकते हैं, जबकि आयामों को एक प्रारूप (मिनट या सेकंड में) में अनुवाद करना न भूलें।
विशिष्ट मामलों में कोणीय वेग क्या है?
आइए उपरोक्त सूत्रों के आधार पर गणना का एक उदाहरण दें। मान लीजिए कि हमारे पास एक कार है। 100 किमी / घंटा की गति से गाड़ी चलाते समय, इसका पहिया, जैसा कि अभ्यास से पता चलता है, प्रति मिनट औसतन 600 चक्कर लगाता है (f = 600 rpm)। आइए कोणीय वेग की गणना करें।
चूँकि दशमलव भिन्नों में ठीक को व्यक्त करना असंभव है, परिणाम लगभग 62.83 rad/s के बराबर होगा।
कोणीय और रैखिक वेग के बीच संबंध
व्यवहार में, अक्सर न केवल उस गति की जांच करना आवश्यक होता है जिसके साथ घूर्णन बिंदु की कोणीय स्थिति बदलती है, बल्कि रैखिक गति के संबंध में इसकी गति भी होती है। ऊपर के उदाहरण में, पहिया के लिए गणना की गई थी - लेकिन पहिया सड़क के साथ चलता है और या तो कार की गति के प्रभाव में घूमता है, या खुद इसे यह गति प्रदान करता है। इसका मतलब है कि पहिया की सतह पर प्रत्येक बिंदु, कोणीय वेग के अलावा, एक रैखिक वेग भी होगा।
इसकी गणना करने का सबसे आसान तरीका त्रिज्या के माध्यम से है। चूंकि गति समय पर निर्भर करती है (जो कि क्रांति की अवधि होगी) और तय की गई दूरी (जो कि परिधि है), तो, उपरोक्त सूत्रों को देखते हुए, कोणीय और रैखिक गति निम्नानुसार संबंधित होगी:
- वी रैखिक गति है;
- आर त्रिज्या है।
सूत्र से यह स्पष्ट है कि त्रिज्या जितनी बड़ी होगी, ऐसी गति का मान उतना ही अधिक होगा। उच्चतम गति वाले पहिये के संबंध में, चलने की बाहरी सतह पर एक बिंदु गति करेगा (R अधिकतम है), लेकिन हब के ठीक केंद्र में, रैखिक गति शून्य होगी।
त्वरण, क्षण और द्रव्यमान के साथ उनका संबंध
उपरोक्त मात्राओं के अलावा, रोटेशन से जुड़े कई अन्य बिंदु भी हैं। यह देखते हुए कि कार में विभिन्न भारों के कितने घूमने वाले हिस्से हैं, उनके व्यावहारिक महत्व को नजरअंदाज नहीं किया जा सकता है।
यूनिफॉर्म रोटेशन एक महत्वपूर्ण चीज है। लेकिन एक भी विवरण ऐसा नहीं है जो हर समय समान रूप से घूमता रहे। क्रैंकशाफ्ट से पहिए तक किसी भी घूर्णन असेंबली के क्रांतियों की संख्या, हमेशा अंततः बढ़ती है और फिर गिरती है। और वह मान जो दर्शाता है कि कितनी क्रांतियां बढ़ी हैं, कोणीय त्वरण कहलाता है। चूंकि यह कोणीय वेग का व्युत्पन्न है, इसे रेडियन प्रति सेकंड वर्ग में मापा जाता है (जैसा कि रैखिक त्वरण मीटर प्रति सेकंड वर्ग में है)।
एक अन्य पहलू भी आंदोलन और समय में इसके परिवर्तन से जुड़ा है - कोणीय गति। यदि इस बिंदु तक हम केवल आंदोलन की विशुद्ध रूप से गणितीय विशेषताओं पर विचार कर सकते हैं, तो यहां पहले से ही इस तथ्य को ध्यान में रखना आवश्यक है कि प्रत्येक भाग में एक द्रव्यमान होता है जो अक्ष के चारों ओर वितरित होता है। यह गति की दिशा को ध्यान में रखते हुए बिंदु की प्रारंभिक स्थिति के अनुपात से निर्धारित होता है - और गति, यानी द्रव्यमान और गति का उत्पाद। रोटेशन के दौरान होने वाले आवेग के क्षण को जानकर, यह निर्धारित करना संभव है कि प्रत्येक भाग पर कौन सा भार गिरेगा जब यह दूसरे के साथ बातचीत करेगा
गति हस्तांतरण के उदाहरण के रूप में काज
उपरोक्त सभी डेटा कैसे लागू होते हैं इसका एक विशिष्ट उदाहरण निरंतर वेग संयुक्त (सीवी संयुक्त) है। यह हिस्सा मुख्य रूप से फ्रंट-व्हील ड्राइव वाहनों पर उपयोग किया जाता है, जहां न केवल मोड़ते समय पहियों के रोटेशन की एक अलग दर सुनिश्चित करना महत्वपूर्ण है, बल्कि उनकी नियंत्रणीयता और इंजन से उन्हें आवेग का हस्तांतरण भी है।
वीडियो देखो
इस नोड का डिज़ाइन ठीक इसके लिए डिज़ाइन किया गया है:
- बराबर करें कि पहिए कितनी तेजी से घूमते हैं;
- रोटेशन के समय रोटेशन प्रदान करें;
- रियर सस्पेंशन की स्वतंत्रता की गारंटी।
नतीजतन, ऊपर दिए गए सभी सूत्रों को SHRUS के संचालन में ध्यान में रखा जाता है।
प्रकृति और प्रौद्योगिकी में सबसे आम प्रकार के आंदोलन में से एक रोटेशन है। अंतरिक्ष में पिंडों की इस प्रकार की गति भौतिक मात्राओं के एक समूह की विशेषता है। किसी भी घूर्णन की एक महत्वपूर्ण विशेषता आवृत्ति है। कुछ मात्राओं और मापदंडों को जानकर घूर्णी गति का सूत्र पाया जा सकता है।
रोटेशन क्या है?
भौतिकी में, इसे एक निश्चित अक्ष के चारों ओर एक भौतिक बिंदु की ऐसी गति के रूप में समझा जाता है, जिसमें इस अक्ष से इसकी दूरी स्थिर रहती है। इसे घूर्णन त्रिज्या कहते हैं।
प्रकृति में इस गति के उदाहरण सूर्य के चारों ओर और अपनी धुरी के चारों ओर ग्रहों का घूमना है। प्रौद्योगिकी में, रोटेशन को शाफ्ट, गियर, कार या साइकिल के पहियों की गति, पवन चक्कियों के ब्लेड की गति द्वारा दर्शाया जाता है।
घूर्णन का वर्णन करने वाली भौतिक मात्राएँ

भौतिकी में रोटेशन के संख्यात्मक विवरण के लिए, कई विशेषताओं को पेश किया गया है। आइए उन्हें सूचीबद्ध करें और उनका वर्णन करें।
सबसे पहले, यह रोटेशन का कोण है, जिसे दर्शाया गया है। चूँकि एक पूर्ण वृत्त को 2 * pi रेडियन के केंद्रीय कोण की विशेषता होती है, फिर, के मान को जानकर, जिसके द्वारा घूर्णन पिंड एक निश्चित अवधि में घूमता है, इस समय के दौरान क्रांतियों की संख्या निर्धारित करना संभव है। इसके अलावा, कोण आपको घुमावदार सर्कल के साथ शरीर द्वारा यात्रा किए गए रैखिक पथ की गणना करने की अनुमति देता है। क्रांतियों की संख्या n और तय की गई दूरी L के लिए संगत सूत्र हैं:
जहाँ r वृत्त की त्रिज्या या घूर्णन की त्रिज्या है।
माना प्रकार की गति की अगली विशेषता कोणीय वेग है। इसे आमतौर पर अक्षर से दर्शाया जाता है। इसे रेडियन प्रति सेकंड में मापा जाता है, यानी यह रेडियन में कोण दिखाता है कि एक घूर्णन शरीर एक सेकंड में बदल जाता है। एकसमान घूर्णन की स्थिति में कोणीय वेग के लिए, सूत्र मान्य है:
कोणीय आवृत्ति, अवधि और कोणीय वेग
यह पहले ही ऊपर उल्लेख किया जा चुका है कि किसी भी घूर्णी गति का एक महत्वपूर्ण गुण एक क्रांति को पूरा करने में लगने वाला समय है। इस समय को परिक्रमण काल कहते हैं। इसे T अक्षर से निरूपित किया जाता है और इसे सेकंड में मापा जाता है। आवर्त T का सूत्र कोणीय वेग के पदों में लिखा जा सकता है। संबंधित अभिव्यक्ति इस तरह दिखती है:
किसी आवर्त के व्युत्क्रम को आवृत्ति कहते हैं। इसे हर्ट्ज़ (हर्ट्ज) में मापा जाता है। परिपत्र गति के लिए, आवृत्ति का उपयोग नहीं करना, बल्कि इसके कोणीय समकक्ष का उपयोग करना सुविधाजनक है। आइए इसे निरूपित करें f. घूर्णन f की कोणीय आवृत्ति का सूत्र है:
पिछले दो सूत्रों की तुलना में, हम निम्नलिखित समानता पर पहुंचते हैं:
इस समानता का अर्थ निम्नलिखित है:
- कोणीय आवृत्ति और कोणीय वेग के सूत्र मेल खाते हैं, इसलिए ये मात्राएँ संख्यात्मक रूप से एक दूसरे के बराबर होती हैं;
- साथ ही गति, आवृत्ति इंगित करती है कि एक शरीर एक सेकंड में रेडियन में किस कोण पर घूमता है।
इन राशियों के बीच केवल एक ही अंतर है: कोणीय आवृत्ति एक अदिश राशि है, जबकि गति एक सदिश है।
रैखिक घूर्णन गति, आवृत्ति और कोणीय आवृत्ति

इंजीनियरिंग में, कुछ घूर्णन संरचनाओं के लिए, उदाहरण के लिए, गियर और शाफ्ट, उनकी ऑपरेटिंग आवृत्तियों μ और रैखिक गति v ज्ञात हैं। हालांकि, इन विशेषताओं में से प्रत्येक का उपयोग कोणीय या चक्रीय आवृत्ति को निर्धारित करने के लिए किया जा सकता है।
यह ऊपर उल्लेख किया गया था कि आवृत्ति μ हर्ट्ज में मापा जाता है। यह एक सेकंड में घूमने वाले पिंड के चक्करों की संख्या को दर्शाता है। इसके लिए सूत्र रूप लेता है:
यदि हम f के लिए इसी समानता के साथ इस अभिव्यक्ति की तुलना करते हैं, तो रोटेशन आवृत्ति f को μ के माध्यम से कैसे वर्णित किया जाए, इसका वर्णन करने वाला सूत्र इस तरह दिखेगा:
यह सूत्र सहज है क्योंकि μ समय की प्रति इकाई क्रांतियों की संख्या है, जबकि f वही मान है, जिसे केवल रेडियन में व्यक्त किया जाता है।
रैखिक गति v निम्नलिखित समीकरण द्वारा कोणीय गति से संबंधित है:
चूंकि f और ω के मॉड्यूल समान हैं, इसलिए अंतिम व्यंजक से चक्रीय घूर्णन आवृत्ति के लिए संगत सूत्र प्राप्त करना आसान है। आइए इसे लिख लें:
जहाँ r घूर्णन की त्रिज्या है। ध्यान दें कि वेग v बढ़ती त्रिज्या के साथ रैखिक रूप से बढ़ता है, जबकि इन मात्राओं का अनुपात स्थिर होता है। अंतिम निष्कर्ष का अर्थ है कि यदि आप एक घूर्णन विशाल वस्तु के खंड में किसी भी बिंदु पर चक्रीय घूर्णन आवृत्ति को मापते हैं, तो यह हर जगह समान होगा।
शाफ्ट की चक्रीय गति निर्धारित करने का कार्य

कोणीय गति में उपयोगी जानकारी होती है क्योंकि वे आपको कोणीय गति या कोणीय वेग जैसी महत्वपूर्ण भौतिक विशेषताओं की गणना करने की अनुमति देती हैं। आइए निम्नलिखित समस्या को हल करें: यह ज्ञात है कि शाफ्ट की संचालन गति 1500 आरपीएम है। इस शाफ्ट के लिए चक्रीय आवृत्ति क्या है?
स्थिति में दी गई माप की इकाइयों से यह स्पष्ट है कि सामान्य आवृत्ति μ दी गई है। इसलिए, चक्रीय शाफ्ट के घूर्णन की आवृत्ति के सूत्र का रूप है:
इसका उपयोग करने से पहले, आपको स्थिति में बताए गए आंकड़े को माप की मानक इकाइयों, यानी पारस्परिक सेकंड में परिवर्तित करना चाहिए। चूंकि शाफ्ट प्रति मिनट 1500 चक्कर लगाता है, तो एक सेकंड में यह 60 गुना कम चक्कर लगाएगा, यानी 25। यानी इसकी रोटेशन आवृत्ति 25 हर्ट्ज है। इस संख्या को ऊपर लिखे सूत्र में प्रतिस्थापित करने पर, हमें चक्रीय आवृत्ति का मान प्राप्त होता है: f = 157 rad/s.
उपकरण डिजाइन करते समय, इलेक्ट्रिक मोटर के क्रांतियों की संख्या जानना आवश्यक है। गति की गणना करने के लिए, विशेष सूत्र हैं जो एसी और डीसी मोटर्स के लिए भिन्न हैं।
तुल्यकालिक और अतुल्यकालिक विद्युत मशीनें
एसी मोटर्स तीन प्रकार की होती हैं: सिंक्रोनस, रोटर का कोणीय वेग, जो स्टेटर चुंबकीय क्षेत्र की कोणीय आवृत्ति के साथ मेल खाता है; अतुल्यकालिक - उनमें, रोटर का घुमाव क्षेत्र के घूर्णन से पिछड़ जाता है; कलेक्टर, जिसका डिजाइन और संचालन का सिद्धांत डीसी मोटर्स के समान है।
तुल्यकालिक गति
एसी इलेक्ट्रिक मशीन की घूर्णन गति स्टेटर चुंबकीय क्षेत्र की कोणीय आवृत्ति पर निर्भर करती है। इस गति को तुल्यकालिक कहा जाता है। सिंक्रोनस मोटर्स में, शाफ्ट उसी गति से घूमता है, जो इन इलेक्ट्रिक मशीनों का एक फायदा है।
ऐसा करने के लिए, उच्च-शक्ति मशीनों के रोटर में एक घुमावदार होता है जिसमें एक निरंतर वोल्टेज लगाया जाता है, जो एक चुंबकीय क्षेत्र बनाता है। कम बिजली वाले उपकरणों में, स्थायी चुंबक रोटर में डाले जाते हैं, या स्पष्ट ध्रुव होते हैं।
फिसलना
अतुल्यकालिक मशीनों में, शाफ्ट की क्रांतियों की संख्या तुल्यकालिक कोणीय आवृत्ति से कम होती है। इस अंतर को "S" स्लिप कहा जाता है। पर्ची के कारण रोटर में एक विद्युत प्रवाह प्रेरित होता है, और शाफ्ट घूमता है। जितना बड़ा S, उतना ही अधिक टॉर्क और कम गति। हालाँकि, यदि पर्ची एक निश्चित मान से अधिक हो जाती है, तो इलेक्ट्रिक मोटर रुक जाती है, ज़्यादा गरम होने लगती है और विफल हो सकती है। ऐसे उपकरणों की घूर्णी गति की गणना नीचे दिए गए चित्र में सूत्र के अनुसार की जाती है, जहाँ:
- n प्रति मिनट क्रांतियों की संख्या है,
- एफ - नेटवर्क आवृत्ति,
- p ध्रुवों के युग्मों की संख्या है,
- एस - पर्ची।

ऐसे उपकरण दो प्रकार के होते हैं:
- गिलहरी-पिंजरे रोटर के साथ। इसमें घुमावदार निर्माण प्रक्रिया के दौरान एल्यूमीनियम से डाली जाती है;
- चरण रोटर के साथ। वाइंडिंग तार से बने होते हैं और अतिरिक्त प्रतिरोधों से जुड़े होते हैं।
गति नियंत्रण
काम की प्रक्रिया में, इलेक्ट्रिक मशीनों के क्रांतियों की संख्या को समायोजित करना आवश्यक हो जाता है। यह तीन तरीकों से किया जाता है:
- फेज रोटर के साथ इलेक्ट्रिक मोटर्स के रोटर सर्किट में अतिरिक्त प्रतिरोध बढ़ाना। यदि गति को बहुत कम करना आवश्यक है, तो इसे तीन नहीं, बल्कि दो प्रतिरोधों को जोड़ने की अनुमति है;
- स्टेटर सर्किट में अतिरिक्त प्रतिरोधों का कनेक्शन। इसका उपयोग उच्च शक्ति वाली विद्युत मशीनों को शुरू करने और छोटी इलेक्ट्रिक मोटरों की गति को समायोजित करने के लिए किया जाता है। उदाहरण के लिए, एक टेबल फैन के चक्करों की संख्या को इसके साथ श्रृंखला में एक गरमागरम लैंप या कैपेसिटर को जोड़कर कम किया जा सकता है। वही परिणाम आपूर्ति वोल्टेज में कमी देता है;
- नेटवर्क आवृत्ति परिवर्तन। तुल्यकालिक और अतुल्यकालिक मोटर्स के लिए उपयुक्त।
ध्यान!एसी नेटवर्क से चलने वाले कलेक्टर इलेक्ट्रिक मोटर्स के रोटेशन की गति नेटवर्क की आवृत्ति पर निर्भर नहीं करती है।
डीसी मोटर्स
एसी मशीनों के अलावा, डीसी नेटवर्क से जुड़े इलेक्ट्रिक मोटर भी हैं। ऐसे उपकरणों के क्रांतियों की संख्या की गणना पूरी तरह से अलग सूत्रों का उपयोग करके की जाती है।
रेटेड रोटेशन गति
डीसी मशीन के चक्करों की संख्या की गणना नीचे दिए गए चित्र में सूत्र का उपयोग करके की जाती है, जहां:
- n प्रति मिनट क्रांतियों की संख्या है,
- यू - नेटवर्क वोल्टेज,
- रिया और इया - आर्मेचर प्रतिरोध और करंट,
- सीई - मोटर स्थिरांक (विद्युत मशीन के प्रकार पर निर्भर करता है),
- एफ स्टेटर का चुंबकीय क्षेत्र है।
ये डेटा इलेक्ट्रिक मशीन के मापदंडों के नाममात्र मूल्यों, फील्ड वाइंडिंग और आर्मेचर पर वोल्टेज या मोटर शाफ्ट पर टॉर्क के अनुरूप हैं। उन्हें बदलने से आप गति को समायोजित कर सकते हैं। एक वास्तविक मोटर में चुंबकीय प्रवाह को निर्धारित करना बहुत मुश्किल है, इसलिए, गणना के लिए, उत्तेजना घुमावदार या आर्मेचर वोल्टेज के माध्यम से बहने वाली धारा की ताकत का उपयोग किया जाता है।

एसी कलेक्टर मोटर्स के क्रांतियों की संख्या एक ही सूत्र का उपयोग करके पाई जा सकती है।
गति नियंत्रण
डीसी नेटवर्क से चलने वाली इलेक्ट्रिक मोटर की गति का समायोजन एक विस्तृत श्रृंखला में संभव है। यह दो श्रेणियों में उपलब्ध है:
- नाममात्र से ऊपर। ऐसा करने के लिए, अतिरिक्त प्रतिरोधों या वोल्टेज नियामक की मदद से चुंबकीय प्रवाह को कम किया जाता है;
- बराबर से नीचे। ऐसा करने के लिए, इलेक्ट्रिक मोटर के आर्मेचर पर वोल्टेज को कम करना या इसके साथ श्रृंखला में प्रतिरोध को चालू करना आवश्यक है। गति को कम करने के अलावा, यह इलेक्ट्रिक मोटर शुरू करते समय किया जाता है।
उपकरण को डिजाइन और चालू करते समय इलेक्ट्रिक मोटर के रोटेशन की गति की गणना करने के लिए कौन से फॉर्मूले का उपयोग किया जाता है, यह जानना आवश्यक है।
वीडियो