Leia algmaatriksi determinant. Kui maatriksi determinant on null, siis selle pöördväärtust ei eksisteeri.
Probleemi sõnastamine
Ülesanne hõlmab kasutaja tutvustamist arvuliste meetodite põhimõistetega, nagu determinant ja pöördmaatriks, ning nende arvutamise erinevate viisidega. Selles teoreetilises aruandes tutvustatakse lihtsas ja arusaadavas keeles esmalt põhimõisteid ja definitsioone, mille põhjal viiakse läbi edasised uuringud. Kasutajal ei pruugi olla eriteadmisi arvmeetodite ja lineaaralgebra vallas, kuid ta saab hõlpsasti selle töö tulemusi kasutada. Selguse huvides on toodud programm maatriksdeterminandi arvutamiseks mitme meetodi abil, mis on kirjutatud C ++ programmeerimiskeeles. Programmi kasutatakse laboratoorse stendina aruande illustratsioonide koostamiseks. Samuti uuritakse lineaarsete algebraliste võrrandite süsteemide lahendamise meetodeid. Pöördmaatriksi arvutamise kasutu on tõestatud, nii et töö pakub optimaalsemaid viise võrrandite lahendamiseks ilma seda arvutamata. Selgitatakse, miks on nii palju erinevaid determinantide ja pöördmaatriksite arvutamise meetodeid ning analüüsitakse nende puudusi. Arvesse võetakse ka determinandi arvutamise vigu ja hinnatakse saavutatud täpsust. Lisaks venekeelsetele terminitele kasutatakse töös ka nende ingliskeelseid vasteid, et mõista, milliste nimede all otsida raamatukogudest arvprotseduure ja mida tähendavad nende parameetrid.
Põhimõisted ja lihtsad omadused
Determinant
Tutvustame mistahes järku ruutmaatriksi determinandi definitsiooni. See määratlus teeb korduv, st selleks, et teha kindlaks, mis on järjestusmaatriksi determinant, pead juba teadma, mis on järjestusmaatriksi determinant. Pange tähele ka seda, et determinant on olemas ainult ruutmaatriksite jaoks.
Ruutmaatriksi determinanti tähistatakse või det .
Definitsioon 1. determinant ruutmaatriks  helistatakse teise järjekorra numbrile
helistatakse teise järjekorra numbrile ![]() .
.
determinant  järjekorra ruutmaatriksit nimetatakse arvuks
järjekorra ruutmaatriksit nimetatakse arvuks 
kus on maatriksist esimese rea ja numbriga veeru kustutamise teel saadud järjestusmaatriksi determinant.
Selguse huvides kirjutame üles, kuidas saate arvutada neljandat järku maatriksi determinandi: 
Kommenteeri. Erandjuhtudel kasutatakse definitsioonist lähtuvat tegelikku determinantide arvutamist kolmandat järku maatriksite puhul. Arvutamine toimub reeglina teiste algoritmide järgi, millest tuleb juttu hiljem ja mis nõuavad vähem arvutustööd.
Kommenteeri. Definitsioonis 1 oleks täpsem öelda, et determinant on funktsioon, mis on defineeritud ruutjärjestuse maatriksite komplektis ja võtab väärtusi arvude hulgast.
Kommenteeri. Kirjanduses kasutatakse mõiste "determinant" asemel ka mõistet "determinant", millel on sama tähendus. Sõnast "determinant" tekkis tähis det.
Vaatleme mõningaid determinantide omadusi, mille sõnastame väidete kujul.
1. väide. Maatriksi transponeerimisel determinant ei muutu, st .
2. väide. Ruutmaatriksite korrutise determinant on võrdne tegurite determinantide korrutisega, see tähendab .
3. väide. Kui maatriksis vahetatakse kaks rida, muutub selle determinant märki.
4. väide. Kui maatriksil on kaks identset rida, siis on selle determinant null.
Tulevikus peame stringe lisama ja stringi arvuga korrutama. Teeme need toimingud ridade (veerudega) samamoodi nagu reamaatriksite (veerumaatriksite) toimingud, st elemendi kaupa. Tulemuseks on rida (veerg), mis reeglina ei ühti algse maatriksi ridadega. Ridade (veergude) liitmise ja arvuga korrutamise operatsioonide olemasolul võime rääkida ka ridade (veergude) lineaarsetest kombinatsioonidest, see tähendab summadest numbriliste koefitsientidega.
5. väide. Kui maatriksi rida korrutatakse arvuga, korrutatakse selle determinant selle arvuga.
6. väide. Kui maatriksis on null rida, siis on selle determinant null.
7. väide. Kui üks maatriksi ridadest on võrdne teisega korrutatuna arvuga (read on võrdelised), siis on maatriksi determinant null.
Väide 8. Olgu maatriksi i-s rida välja nagu . Seejärel, kus maatriks saadakse maatriksist, asendades i-nda rea reaga, ja maatriks saadakse asendades i-nda rea reaga .
Väide 9. Kui üks maatriksi ridadest liidetakse teisele, korrutatakse arvuga, siis maatriksi determinant ei muutu.
10. väide. Kui maatriksi üks ridadest on selle teiste ridade lineaarne kombinatsioon, siis on maatriksi determinant null.
2. definitsioon. Algebraline liitmine maatriksi elemendile nimetatakse arvu, mis on võrdne , kus on maatriksist i-nda rea ja j-nda veeru kustutamisel saadud maatriksi determinant. Maatriksi elemendi algebralist täiendit tähistatakse .
Näide. Lase  . Siis
. Siis 

Kommenteeri. Algebralisi liitmisi kasutades saab 1 determinandi definitsiooni kirjutada järgmiselt: 
Väide 11. Determinandi lagunemine suvalises stringis.
Maatriksdeterminant rahuldab valemit 
Näide. Arvutama  .
.
Lahendus. Kasutame kolmanda rea laiendust, see on tulusam, sest kolmandal real on kaks numbrit kolmest nullid. Hangi 
Väide 12. Ruutmaatriksi jaoks, mille järjekord on , on meil seos  .
.
Väide 13. Kõik ridade jaoks formuleeritud determinandi omadused (laused 1 - 11) kehtivad ka veergude puhul, eelkõige kehtib determinandi dekomponeerimine j-ndas veerus  ja võrdsus
ja võrdsus  aadressil .
aadressil .
Väide 14. Kolmnurkse maatriksi determinant on võrdne selle põhidiagonaali elementide korrutisega.
Tagajärg. Identiteedimaatriksi determinant on võrdne ühega, .
Järeldus. Eelpool loetletud omadused võimaldavad suhteliselt väikese arvutusmahuga leida piisavalt kõrge järgu maatriksite determinante. Arvutusalgoritm on järgmine.
Algoritm nullide loomiseks veerus. Olgu nõutav järjekorra determinandi arvutamine. Kui , siis vahetage esimene rida ja mis tahes muu rida, mille esimene element ei ole null. Selle tulemusena on determinant , võrdne uue maatriksi determinandiga, millel on vastupidine märk. Kui iga rea esimene element on võrdne nulliga, siis on maatriksil nullveerg ja väidete 1, 13 järgi on selle determinant võrdne nulliga.
Seega arvestame sellega juba algses maatriksis . Jäta esimene rida muutmata. Liidame teisele reale esimene rida, mis on korrutatud arvuga . Siis on teise rea esimene element võrdne  .
.
Uue teise rea ülejäänud elemendid tähistatakse , . Uue maatriksi determinant vastavalt lausele 9 on võrdne . Korrutage esimene rida numbriga ja lisage see kolmandale. Uue kolmanda rea esimene element on võrdne 
Uue kolmanda rea ülejäänud elemendid tähistatakse , . Uue maatriksi determinant vastavalt lausele 9 on võrdne .
Jätkame ridade esimeste elementide asemel nullide saamise protsessi. Lõpuks korrutame esimese rea arvuga ja lisame selle viimasele reale. Tulemuseks on maatriks, mida tähistab , ja millel on vorm 
ja . Maatriksi determinandi arvutamiseks kasutame esimeses veerus olevat laiendust
Sellest ajast 
Järjestusmaatriksi determinant asub paremal pool. Rakendame sellele sama algoritmi ja maatriksi determinandi arvutamine taandatakse järjestusmaatriksi determinandi arvutamiseks. Protsessi korratakse, kuni jõuame teist järku determinandini, mis arvutatakse definitsiooni järgi.
Kui maatriksil ei ole mingeid spetsiifilisi omadusi, siis ei ole võimalik arvutuste mahtu võrreldes pakutud algoritmiga oluliselt vähendada. Selle algoritmi hea külg on ka see, et arvuti jaoks on lihtne kirjutada programm suurte tellimuste maatriksite determinantide arvutamiseks. Determinantide arvutamise standardprogrammides kasutatakse seda algoritmi väikeste muudatustega, mis on seotud ümardamisvigade ja sisendandmete vigade mõju minimeerimisega arvutiarvutustes.
Näide. Arvutage maatriksdeterminant  .
.
Lahendus. Esimene rida jäetakse muutmata. Teisele reale lisame esimese, korrutatuna arvuga:
Determinant ei muutu. Kolmandale reale lisame esimese, korrutatuna arvuga:
Determinant ei muutu. Neljandale reale lisame esimese, korrutatuna arvuga:
Determinant ei muutu. Selle tulemusena saame 
Sama algoritmi kasutades arvutame 3. järku maatriksi determinandi, mis asub paremal. Jätame esimese rea muutmata, teisele reale lisame esimese, korrutatuna arvuga  :
:
Kolmandale reale lisame esimese, korrutatuna arvuga  :
:
Selle tulemusena saame 
Vastus. .
Kommenteeri. Kuigi arvutustes kasutati murde, saadi tulemuseks täisarv. Tõepoolest, kasutades determinantide omadusi ja tõsiasja, et algarvud on täisarvud, saaks tehteid murdudega vältida. Kuid inseneripraktikas on numbrid üliharva täisarvud. Seetõttu on determinandi elemendid reeglina kümnendmurrud ja arvutuste lihtsustamiseks ei ole soovitatav kasutada mingeid nippe.
pöördmaatriks
3. definitsioon. Maatriksit nimetatakse pöördmaatriks ruutmaatriksi jaoks, kui .
Definitsioonist järeldub, et pöördmaatriks on maatriksiga samas järjekorras ruutmaatriks (muidu üks korrutistest või ei oleks määratletud).
Maatriksi pöördmaatriksit tähistatakse . Seega, kui on olemas, siis .
Pöördmaatriksi definitsioonist järeldub, et maatriks on maatriksi pöördväärtus, st . Maatriksid ja võib öelda, et need on üksteise suhtes pöördvõrdelised või vastastikku pöördvõrdelised.
Kui maatriksi determinant on null, siis selle pöördväärtust ei eksisteeri.
Kuna pöördmaatriksi leidmiseks on oluline, kas maatriksi determinant on võrdne nulliga või mitte, toome sisse järgmised definitsioonid.
4. definitsioon. Nimetagem ruutmaatriksiks degenereerunud või spetsiaalne maatriks, kui ja mitte-mandunud või mitteainsuse maatriks, kui .
avaldus. Kui pöördmaatriks on olemas, on see ainulaadne.
avaldus. Kui ruutmaatriks on mittedegenereerunud, siis eksisteerib selle pöördmaatriks ja 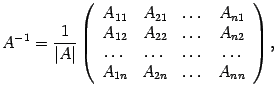 (1) kus on elementide algebralised liitmised .
(1) kus on elementide algebralised liitmised .
Teoreem. Ruutmaatriksi pöördmaatriks eksisteerib siis ja ainult siis, kui maatriks on mitteainsuseline, pöördmaatriks on ainulaadne ja valem (1) kehtib.
Kommenteeri. Erilist tähelepanu tuleks pöörata algebraliste liitmiste poolt hõivatud kohtadele pöördmaatriksi valemis: esimene indeks näitab arvu veerg, ja teine on number read, kuhu tuleks kirjutada arvutatud algebraline täiend.
Näide.  .
.
Lahendus. Määraja leidmine
Kuna , siis on maatriks mittedegenereerunud ja selle pöördväärtus on olemas. Algebraliste liitmiste leidmine: 
Koostame pöördmaatriksi, asetades leitud algebralised liited nii, et esimene indeks vastab veerule ja teine reale:  (2)
(2)
Saadud maatriks (2) on vastuseks probleemile.
Kommenteeri. Eelmises näites oleks täpsem vastus kirjutada järgmiselt:  (3)
(3)
Tähistus (2) on aga kompaktsem ja sellega on mugavam teha edasisi arvutusi, kui neid on. Seetõttu on vastuse kirjutamine kujul (2) eelistatav, kui maatriksite elemendid on täisarvud. Ja vastupidi, kui maatriksi elemendid on kümnendmurrud, siis on parem pöördmaatriks kirjutada ilma tegurita ees.
Kommenteeri. Pöördmaatriksi leidmisel tuleb sooritada päris palju arvutusi ja ebatavaline reegel algebraliste liitmiste korrastamiseks lõppmaatriksis. Seetõttu on vea tõenäosus suur. Vigade vältimiseks tuleks teha kontroll: arvutada algmaatriksi korrutis ühes või teises järjekorras lõpliku maatriksi järgi. Kui tulemuseks on identiteedimaatriks, leitakse pöördmaatriks õigesti. Vastasel juhul peate otsima viga.
Näide. Leidke maatriksi pöördväärtus  .
.
Lahendus.
![]() - on olemas.
- on olemas.
Vastus:  .
.
Järeldus. Pöördmaatriksi leidmine valemi (1) järgi nõuab liiga palju arvutusi. Neljandat ja kõrgemat järku maatriksite puhul on see vastuvõetamatu. Pöördmaatriksi leidmise tegelik algoritm antakse hiljem.
Determinandi ja pöördmaatriksi arvutamine Gaussi meetodil
Gaussi meetodit saab kasutada determinandi ja pöördmaatriksi leidmiseks.
Nimelt on maatriksdeterminant võrdne det .
Pöördmaatriks leitakse lineaarvõrrandisüsteemide lahendamisel Gaussi eliminatsioonimeetodi abil:
Kus on identiteedimaatriksi j-s veerg, on soovitud vektor.
Saadud lahendusvektorid - moodustavad ilmselgelt maatriksi veerud, kuna .
Determinandi valemid
1. Kui maatriks on mitteainsus, siis ja (juhtelementide korrutis).
Antud on N tundmatutega lineaarse algebralise võrrandi (SLAE) süsteem, mille kordajateks on maatriksi elemendid ja vabaliikmeteks arvud

Esimene indeks koefitsientide kõrval näitab, millises võrrandis koefitsient asub, ja teine - millisel tundmatutest see asub.
Kui maatriksi determinant ei ole võrdne nulliga

siis on lineaarsete algebraliste võrrandite süsteemil ainulaadne lahendus.
Lineaarsete algebraliste võrrandite süsteemi lahendus on selline järjestatud arvude hulk , mis muudab süsteemi kõik võrrandid õigeks võrrandiks.
Kui süsteemi kõigi võrrandite paremad küljed on võrdsed nulliga, siis nimetatakse võrrandisüsteemi homogeenseks. Juhul, kui osa neist on nullist erinev, on ebaühtlane
![]()
Kui lineaarsete algebraliste võrrandite süsteemil on vähemalt üks lahend, siis nimetatakse seda ühilduvaks, vastasel juhul on see ühildumatu.
Kui süsteemi lahend on unikaalne, siis lineaarvõrrandisüsteemi nimetatakse kindlaks. Juhul, kui liitsüsteemi lahendus ei ole unikaalne, nimetatakse võrrandisüsteemi määramatuks.
Kahte lineaarvõrrandi süsteemi nimetatakse ekvivalentseteks (või ekvivalentseteks), kui ühe süsteemi kõik lahendid on teise lahendused ja vastupidi. Samaväärsed (või samaväärsed) süsteemid saadakse ekvivalentsete teisenduste abil.
SLAE samaväärsed teisendused
1) võrrandite ümberpaigutamine;
2) võrrandite korrutamine (või jagamine) nullist erineva arvuga;
3) mõnele võrrandile teise võrrandi lisamine, mis on korrutatud suvalise nullist erineva arvuga.
SLAE lahendust võib leida erineval viisil.
CRAMERI MEETOD
CRAMERI TEOREEM. Kui tundmatutega lineaarsete algebraliste võrrandite süsteemi determinant erineb nullist, siis on sellel süsteemil ainulaadne lahendus, mis leitakse Crameri valemitega:
![]()
![]() on determinandid, mis moodustuvad i-nda veeru asendamisel vabaliikmete veeruga.
on determinandid, mis moodustuvad i-nda veeru asendamisel vabaliikmete veeruga.
Kui , ja vähemalt üks on nullist erinev, pole SLAE-l lahendusi. Kui ![]() , siis on SLAE-l palju lahendusi. Vaatleme näiteid Crameri meetodi abil.
, siis on SLAE-l palju lahendusi. Vaatleme näiteid Crameri meetodi abil.
—————————————————————
Antakse kolmest lineaarsest võrrandist koosnev süsteem kolme tundmatuga. Lahendage süsteem Crameri meetodil

Leidke tundmatute koefitsientide maatriksi determinant

Kuna , siis on antud võrrandisüsteem järjekindel ja sellel on kordumatu lahendus. Arvutame determinandid:



Crameri valemeid kasutades leiame tundmatud
Niisiis ![]() süsteemi ainus lahendus.
süsteemi ainus lahendus.
Antud on neljast lineaarsest algebralisest võrrandist koosnev süsteem. Lahendage süsteem Crameri meetodil.

Leiame tundmatute koefitsientide maatriksi determinandi. Selleks laiendame seda esimese rea võrra.


Leidke determinandi komponendid:


Asendage leitud väärtused determinandiga
Seega on determinant võrrandisüsteem järjekindel ja sellel on ainulaadne lahendus. Arvutame determinandid Crameri valemite abil:

Laiendame iga determinanti veeru võrra, milles on rohkem nulle.




Crameri valemite järgi leiame
Süsteemne lahendus ![]()
Seda näidet saab lahendada matemaatilise kalkulaatoriga YukhymCALC. Allpool on näidatud programmi fragment ja arvutuste tulemused.

——————————
C R A M E R MEETOD
|1,1,1,1|
D=|5,-3,2,-8|
|3,5,1,4|
|4,2,3,1|
D=1*(-3*1*1+2*4*2+(-8)*5*3-((-8)*1*2+2*5*1+(-3)*4* 3))-1*(5*1*1+2*4*4+(-8)*3*3-((-8)*1*4+2*3*1+5*4*3) )+1*(5*5*1+(-3)*4*4+(-8)*3*2-((-8)*5*4+(-3)*3*1+5* 4*2))-1*(5*1*1+2*4*4+(-8)*3*3-((-8)*1*4+2*3*1+5*4* 3))= 1*(-3+16-120+16-10+36)-1*(5+32-72+32-6-60)+1*(25-48-48+160+9- 40)-1*(75-12+12-40+27-10)=1*(-65)-1*(-69)+1*58-1*52=-65+69+58-52= kümme
|0,1,1,1|
Dx1=|1,-3,2,-8|
|0,5,1,4|
|3,2,3,1|
Dx1=-1*(1*1*1+2*4*3+(-8)*0*3-((-8)*1*3+2*0*1+1*4*3)) +1*(1*5*1+(-3)*4*3+(-8)*0*2-((-8)*5*3+(-3)*0*1+1*4 *2))-1*(1*1*1+2*4*3+(-8)*0*3-((-8)*1*3+2*0*1+1*4*3 ))= -1*(1+24+0+24+0-12)+1*(5-36+0+120+0-8)-1*(15-9+0-30+0-2 )= -1*(37)+1*81-1*(-26)=-37+81+26=70
|1,0,1,1|
Dx2=|5,1,2,-8|
|3,0,1,4|
|4,3,3,1|
Dx2=1*(1*1*1+2*4*3+(-8)*0*3-((-8)*1*3+2*0*1+1*4*3)+ 1*(5*0*1+1*4*4+(-8)*3*3-((-8)*0*4+1*3*1+5*4*3))-1* (5*1*1+2*4*4+(-8)*3*3-((-8)*1*4+2*3*1+5*4*3))= 1*(1 +24+0+24+0-12)+1*(0+16-72+0-3-60)-1*(0+4+18+0-9-15)= 1*37+1* (-119)-1*(-2)=37-119+2=-80
|1,1,0,1|
Dx3=|5,-3,1,-8|
|3,5,0,4|
|4,2,3,1|
Dx3=1*(-3*0*1+1*4*2+(-8)*5*3-((-8)*0*2+1*5*1+(-3)*4* 3))-1*(5*0*1+1*4*4+(-8)*3*3-((-8)*0*4+1*3*1+5*4*3) )-1*(5*0*1+1*4*4+(-8)*3*3-((-8)*0*4+1*3*1+5*4*3))= 1*(0+8-120+0-5+36)-1*(0+16-72+0-3-60)-1*(75+0+6-20+27+0)= 1* (-81)-1*(-119)-1*88=-81+119-88=-50
|1,1,1,0|
Dx4=|5,-3,2,1|
|3,5,1,0|
|4,2,3,3|
Dx4=1*(-3*1*3+2*0*2+1*5*3-(1*1*2+2*5*3+(-3)*0*3))-1* (5*1*3+2*0*4+1*3*3-(1*1*4+2*3*3+5*0*3))+1*(5*5*3+( -3)*0*4+1*3*2-(1*5*4+(-3)*3*3+5*0*2))= 1*(-9+0+15-2- 30+0)-1*(15+0+9-4-18+0)+1*(75+0+6-20+27+0)= 1*(-26)-1*(2)+ 1*88=-26-2+88=60
x1=Dx1/D=70,0000/10,0000=7,0000
x2=Dx2/D=-80,0000/10,0000=-8,0000
x3=Dx3/D=-50,0000/10,0000=-5,0000
x4=Dx4/D=60,0000/10,0000=6,0000
Vaata materjale:
(jcomments on)
Üldjuhul on järgu determinantide arvutamise reegel üsna tülikas. Teist ja kolmandat järku determinantide jaoks on olemas ratsionaalsed viisid nende arvutamiseks.
Teist järku determinantide arvutused
Teist järku maatriksi determinandi arvutamiseks on vaja põhidiagonaali elementide korrutis lahutada sekundaarse diagonaali elementide korrutis:
![]()
Näide
Harjutus. Arvutage teist järku determinant
Lahendus.
Vastus.![]()
Kolmandat järku determinantide arvutamise meetodid
Kolmandat järku determinantide arvutamiseks kehtivad reeglid.
kolmnurga reegel
Skemaatiliselt saab seda reeglit kujutada järgmiselt:

Esimeses determinandis olevate joontega ühendatud elementide korrutis võetakse plussmärgiga; samamoodi teise determinandi puhul võetakse vastavad korrutised miinusmärgiga, s.t.
Näide
Harjutus. Arvuta determinant  kolmnurga meetod.
kolmnurga meetod.
Lahendus.
Vastus.
Sarrus valitseb
Determinandist paremale liidetakse kaks esimest veergu ning plussmärgiga võetakse põhidiagonaalil ja sellega paralleelsetel diagonaalidel olevate elementide korrutised; ning sekundaarse diagonaali ja sellega paralleelsete diagonaalide elementide korrutised miinusmärgiga:

Näide
Harjutus. Arvuta determinant kasutades Sarruse reeglit.
Lahendus.
Vastus.
Determinandi rea või veeru laiendus
Determinant on võrdne determinandi rea elementide ja nende algebraliste täiendite korrutistega.
Tavaliselt vali rida/veerg, milles/-ndas on nullid. Rida või veerg, millel lagunemine toimub, tähistatakse noolega.
Näide
Harjutus. Laiendades üle esimese rea, arvutage determinant
Lahendus.
Vastus.
See meetod võimaldab determinandi arvutamise taandada madalamat järku determinandi arvutamiseks.
Näide
Harjutus. Arvuta determinant
Lahendus. Teeme determinandi ridadel järgmised teisendused: teisest reast lahutame esimesed neli ja kolmandast esimese rea korrutatuna seitsmega, mille tulemusena saame vastavalt determinandi omadustele determinandi. võrdne antud ühega.


Determinant on null, kuna teine ja kolmas rida on võrdelised.
Vastus.
Neljandat ja kõrgemat järku determinantide arvutamiseks kasutatakse kas rea/veeru laiendamist või taandamist kolmnurkseks vormiks või Laplace'i teoreemi.
Determinandi lagunemine rea või veeru elementide järgi
Näide
Harjutus. Arvuta determinant  , lagundades selle mõne rea või veeru elementide järgi.
, lagundades selle mõne rea või veeru elementide järgi.
Lahendus. Teeme esmalt determinandi ridadel elementaarteisendused, tehes kas reas või veerus võimalikult palju nulle. Selleks lahutame kõigepealt esimesest reast üheksa kolmandikku, teisest viis kolmandikku ja neljandast kolm kolmandikku, saame:

Laiendame saadud determinanti esimese veeru elementide võrra:

Saadud kolmandat järku determinanti laiendatakse ka rea ja veeru elementidega, olles eelnevalt saanud näiteks esimeses veerus nullid.
Selleks lahutame esimesest reast kaks teist rida ja kolmandast teise:

Vastus.
Kommenteeri
Viimast ja eelviimast determinanti ei saanud arvutada, kuid järeldada kohe, et need on võrdsed nulliga, kuna need sisaldavad proportsionaalseid ridu.
Determinandi toomine kolmnurksesse vormi
Üle ridade või veergude tehtavate elementaarteisenduste abil taandatakse determinant kolmnurkseks ja seejärel võrdub selle väärtus vastavalt determinandi omadustele põhidiagonaalil olevate elementide korrutisega.
Näide
Harjutus. Arvuta determinant  muutes selle kolmnurkseks.
muutes selle kolmnurkseks.
Lahendus. Esiteks teeme põhidiagonaali all olevasse esimesse veergu nullid.
4. Determinantide omadused. Maatriksite korrutise determinant.
Kõiki teisendusi on lihtsam teostada, kui element on võrdne 1-ga. Selleks vahetame determinandi esimese ja teise veeru, mis vastavalt determinandi omadustele muudab selle märgi vastupidiseks:


Järgmisena saame põhidiagonaali all olevate elementide asemele nullid teises veerus. Ja jälle, kui diagonaalelement on võrdne , on arvutused lihtsamad. Selleks vahetame teise ja kolmanda rea (ja samal ajal muudame determinandi vastasmärgiks):




Vastus.
Laplace'i teoreem
Näide
Harjutus. Arvutage Laplace'i teoreemi abil determinant 
Lahendus. Valime selles viiendat järku determinandis kaks rida - teise ja kolmanda, siis saame (jätame välja nulliga võrdsed terminid):

Vastus.
LINEAARSED VÕRDED JA VÕRRADUSED I
§ 31 Juhtum, kui võrrandisüsteemi põhideterminant on võrdne nulliga ja vähemalt üks abideterminant on nullist erinev
Teoreem.Kui võrrandisüsteemi põhideterminant
![]() (1)
(1)
võrdub nulliga ja vähemalt üks abideterminantidest erineb nullist, siis on süsteem ebajärjekindel.
Formaalselt ei ole selle teoreemi tõestust raske saada vastuoluga. Oletame, et võrrandisüsteemil (1) on lahendus ( x 0 , y 0). arvestades, et nagu on näidatud eelmises lõigus,
Δ x 0 = Δ x , Δ y 0 = Δ y (2)
Aga tingimuse järgi Δ = 0 ja vähemalt üks determinantidest Δ x ja Δ y nullist erinev. Seega võrdsused (2) ei saa kehtida samaaegselt. Teoreem on tõestatud.
Siiski tundub huvitav selgitada üksikasjalikumalt, miks võrrandisüsteem (1) on vaadeldaval juhul ebaühtlane.

tähendab, et võrrandisüsteemi (1) tundmatute koefitsiendid on võrdelised. Olgu näiteks
a 1 = ka 2 ,b 1 = kb 2 .

tähendab, et koefitsiendid juures ja süsteemi (1) võrrandite vabad liikmed ei ole võrdelised. Kuna b 1 = kb 2, siis c 1 =/= kc 2 .
Seetõttu saab võrrandisüsteemi (1) kirjutada järgmisel kujul:

Selles süsteemis on tundmatute koefitsiendid vastavalt proportsionaalsed, kuid koefitsiendid jaoks juures (või millal X ) ja vabad tingimused ei ole proportsionaalsed. Selline süsteem on loomulikult vastuoluline. Tõepoolest, kui tal oleks lahendus ( x 0 , y 0), seejärel arvulised võrdsused
k (a 2 x 0 + b 2 y 0) = c 1
a 2 x 0 + b 2 y 0 = c 2 .
Kuid üks neist võrdsustest on teisega vastuolus: lõppude lõpuks c 1 =/= kc 2 .
Oleme käsitlenud ainult juhust, kui Δ x =/= 0. Samamoodi võime vaadelda juhtumit, kui Δ y =/= 0."
Tõestatud teoreemi saab sõnastada järgmiselt.
Kui tundmatute koefitsiendid X ja juures võrrandisüsteemis (1) on võrdelised ning nende tundmatute ja vabade liikmete koefitsiendid ei ole proportsionaalsed, siis on see võrrandisüsteem ebajärjekindel.
Näiteks on lihtne kontrollida, kas kõik need süsteemid on vastuolulised:


Crameri meetod lineaarvõrrandisüsteemide lahendamiseks
Crameri valemid
Crameri meetod põhineb determinantide kasutamisel lineaarvõrrandisüsteemide lahendamisel. See kiirendab oluliselt lahendusprotsessi.
Crameri meetodi abil saab lahendada nii paljudest lineaarsetest võrranditest koosneva süsteemi kui igas võrrandis on tundmatuid.
Crameri meetod. Rakendus lineaarvõrrandisüsteemide jaoks
Kui süsteemi determinant ei ole võrdne nulliga, siis saab lahenduses kasutada Crameri meetodit, kui see on võrdne nulliga, siis mitte. Lisaks saab Crameri meetodit kasutada lineaarvõrrandisüsteemide lahendamiseks, millel on unikaalne lahendus.
Definitsioon. Tundmatute koefitsientidest koosnevat determinanti nimetatakse süsteemi determinandiks ja seda tähistatakse (delta).
Determinandid
saadakse, asendades koefitsiendid vastavate tundmatute juures vabade terminitega:
 ;
;
 .
.
Crameri teoreem. Kui süsteemi determinant on nullist erinev, siis on lineaarvõrrandisüsteemil üks lahendus ja tundmatu on võrdne determinantide suhtega. Nimetaja sisaldab süsteemi determinanti ja lugeja sisaldab determinanti, mis on saadud süsteemi determinandist, asendades koefitsiendid tundmatuga vabade liikmetega. See teoreem kehtib mis tahes järku lineaarvõrrandisüsteemi kohta.
Näide 1 Lahendage lineaarvõrrandi süsteem:
Vastavalt Crameri teoreem meil on:


Niisiis, süsteemi (2) lahendus:
Kolm juhtumit lineaarvõrrandisüsteemide lahendamisel
Nagu selgub alates Crameri teoreemid Lineaarvõrrandisüsteemi lahendamisel võib esineda kolm juhtumit:

Esimene juhtum: lineaarvõrrandisüsteemil on ainulaadne lahendus
(süsteem on järjekindel ja kindel)
* 

Teine juhtum: lineaarvõrrandisüsteemil on lõpmatu arv lahendeid
(süsteem on järjekindel ja määramatu)
**  ,
,
need. tundmatute ja vabaliikmete koefitsiendid on võrdelised.

Kolmas juhtum: lineaarvõrrandisüsteemil pole lahendeid
(süsteem ebajärjekindel)
Seega süsteem m lineaarvõrrandid n nimetatakse muutujaid Sobimatu kui sellel pole lahendusi ja liigend kui sellel on vähemalt üks lahendus. Nimetatakse ühendatud võrrandisüsteemi, millel on ainult üks lahend teatud, ja rohkem kui üks ebakindel.
Näited lineaarvõrrandisüsteemide lahendamisest Crameri meetodil
Las süsteem
 .
.
Crameri teoreemi alusel
………….
,
kus  —
—
süsteemi identifikaator. Ülejäänud determinandid saadakse, asendades veeru vastava muutuja (tundmatu) koefitsientidega vabaliikmetega:



Näide 2
 .
.
Seetõttu on süsteem kindel. Selle lahenduse leidmiseks arvutame determinandid



Crameri valemite järgi leiame:
![]()
Seega on (1; 0; -1) süsteemi ainus lahendus.
Võrrandisüsteemide 3 X 3 ja 4 X 4 lahenduste kontrollimiseks saab kasutada online-kalkulaatorit, Crameri lahendusmeetodit.
Kui lineaarvõrrandisüsteemis ei ole ühes või mitmes võrrandis muutujaid, siis determinandis on neile vastavad elemendid võrdsed nulliga! See on järgmine näide.
Näide 3 Lahendage lineaarvõrrandisüsteem Crameri meetodil:
 .
.
Lahendus. Leiame süsteemi determinandi:

Vaadake hoolikalt võrrandisüsteemi ja süsteemi determinanti ning korrake vastust küsimusele, millistel juhtudel on determinandi üks või mitu elementi võrdsed nulliga. Seega ei ole determinant võrdne nulliga, seega on süsteem kindel. Selle lahenduse leidmiseks arvutame tundmatute determinandid



Crameri valemite järgi leiame:
Seega on süsteemi lahendus (2; -1; 1).
Võrrandisüsteemide 3 X 3 ja 4 X 4 lahenduste kontrollimiseks saab kasutada online-kalkulaatorit, Crameri lahendusmeetodit.
Lehe ülaosa
Osalege lineaarvõrrandisüsteemide viktoriinil
Nagu juba mainitud, kui süsteemi determinant on võrdne nulliga ja tundmatute determinandid ei ole nulliga, on süsteem ebajärjekindel, see tähendab, et tal pole lahendusi. Illustreerime järgmise näitega.
Näide 4 Lahendage lineaarvõrrandisüsteem Crameri meetodil:

Lahendus. Leiame süsteemi determinandi:

Süsteemi determinant on võrdne nulliga, seetõttu on lineaarvõrrandisüsteem kas ebajärjekindel ja kindel või vastuoluline, see tähendab, et tal pole lahendeid. Selguse huvides arvutame tundmatute determinandid



Tundmatute determinandid ei ole nulliga võrdsed, seetõttu on süsteem ebajärjekindel, st tal pole lahendusi.
Võrrandisüsteemide 3 X 3 ja 4 X 4 lahenduste kontrollimiseks saab kasutada online-kalkulaatorit, Crameri lahendusmeetodit.
Lineaarvõrrandisüsteemide ülesannetes on ka selliseid, kus lisaks muutujaid tähistavatele tähtedele on ka teisi tähti. Need tähed tähistavad mõnda numbrit, enamasti reaalarvu. Praktikas toovad sellised võrrandid ja võrrandisüsteemid kaasa probleeme mis tahes nähtuste ja objektide üldiste omaduste leidmisel. See tähendab, et leiutasite mingi uue materjali või seadme ja selle omaduste kirjeldamiseks, mis on levinud olenemata koopiate suurusest või arvust, peate lahendama lineaarvõrrandisüsteemi, kus muutujate mõne koefitsiendi asemel on tähed. Näiteid ei pea kaugelt otsima.
Järgmine näide on sarnase probleemi jaoks, suureneb ainult mõnda reaalarvu tähistavate võrrandite, muutujate ja tähtede arv.
Näide 6 Lahendage lineaarvõrrandisüsteem Crameri meetodil:

Lahendus. Leiame süsteemi determinandi:

Tundmatute määrajate leidmine



Crameri valemite järgi leiame:
![]() ,
,
![]() ,
,
![]() .
.
Ja lõpuks neljast võrrandist koosnev süsteem nelja tundmatuga.
Näide 7 Lahendage lineaarvõrrandisüsteem Crameri meetodil:
 .
.
Tähelepanu! Neljandat järku determinantide arvutamise meetodeid siin ei selgitata. Pärast seda - saidi vastavasse jaotisesse. Aga mõned kommentaarid tulevad. Lahendus. Leiame süsteemi determinandi:

Väike kommentaar. Algses determinandis lahutati teise rea elementidest neljanda rea elemendid, kolmanda rea elementidest lahutati 2-ga korrutatud neljanda rea elemendid, esimese rea elemendid korrutati 2-ga. lahutatakse neljanda rea elementidest.skeem. Tundmatute määrajate leidmine




Neljanda tundmatuga determinandi teisenduste jaoks lahutati neljanda rea elemendid esimese rea elementidest.
Crameri valemite järgi leiame:
Seega on süsteemi lahendus (1; 1; -1; -1).
Võrrandisüsteemide 3 X 3 ja 4 X 4 lahenduste kontrollimiseks saab kasutada online-kalkulaatorit, Crameri lahendusmeetodit.
Tähelepanelikumad märkasid ilmselt, et artiklis ei olnud näiteid määramatute lineaarvõrrandisüsteemide lahendamisest. Ja kõik seepärast, et selliseid süsteeme pole võimalik Crameri meetodil lahendada, saame vaid väita, et süsteem on määramata. Selliste süsteemide lahendused on antud Gaussi meetodil.

Kas teil pole aega lahendusse süveneda? Tööd saab tellida!
Lehe ülaosa
Osalege lineaarvõrrandisüsteemide viktoriinil
Muu teemal "Võrrandi- ja võrratussüsteemid"
Kalkulaator - lahendage võrrandisüsteeme võrgus
Crameri meetodi programmiline juurutamine C++ keeles
Lineaarvõrrandisüsteemide lahendamine asendusmeetodil ja liitmismeetodil
Lineaarvõrrandisüsteemide lahendamine Gaussi meetodil
Lineaarvõrrandisüsteemi ühilduvuse tingimus.
Kroneckeri-Capelli teoreem
Lineaarvõrrandisüsteemide lahendamine maatriksmeetodil (pöördmaatriks)
Lineaarvõrratuste süsteemid ja kumerad punktihulgad
Teema "Lineaaralgebra" algus
Determinandid
![]()
![]()
![]()
Selles artiklis tutvume väga olulise mõistega lineaaralgebra osast, mida nimetatakse determinandiks.
Tahaksin kohe märkida ühe olulise punkti: determinandi mõiste kehtib ainult ruutmaatriksite puhul (ridade arv = veergude arv), teistel maatriksitel see puudub.
Ruutmaatriksi determinant(determinant) — maatriksi numbriline tunnus.
Determinantide tähistus: |A|, det A, ∆ A.
determinant Järjekorda "n" nimetatakse selle elementide kõigi võimalike korrutiste algebraliseks summaks, mis vastavad järgmistele nõuetele:
1) Iga selline toode sisaldab täpselt "n" elementi (st 2. järku determinant on 2 elementi).
2) Igas tootes on tegurina iga rea ja iga veeru esindaja.
3) Iga toote kaks tegurit ei saa kuuluda samasse ritta või veergu.
Toote märk määratakse veergude numbrite vaheldumise järjekorra järgi, kui tootes on elemendid järjestatud reanumbrite kasvavas järjekorras.
Vaatleme mõnda näidet maatriksi determinandi leidmiseks:
Esimest järku maatriksi jaoks (st.
Lineaarvõrrandid. Lineaarvõrrandisüsteemide lahendamine. Crameri meetod.
on ainult 1 element), on determinant võrdne selle elemendiga:
2. Vaatleme teist järku ruutmaatriksit:

3. Vaatleme kolmandat järku ruutmaatriksit (3×3):
4. Ja nüüd vaadake näiteid reaalarvudega:



Kolmnurga reegel.
Kolmnurga reegel on viis maatriksi determinandi arvutamiseks, mis hõlmab selle leidmist järgmise skeemi järgi:

Nagu te juba aru saite, nimetati meetodit kolmnurga reegliks, kuna korrutatud maatriksi elemendid moodustavad omapärased kolmnurgad.
Selle paremaks mõistmiseks toome näite:

Ja nüüd kaaluge reaalarvudega maatriksi determinandi arvutamist kolmnurga reegli abil:

Kaetud materjali koondamiseks lahendame veel ühe praktilise näite:

Determinantide omadused:
1. Kui rea või veeru elemendid on võrdsed nulliga, siis determinant on võrdne nulliga.
2. Determinant muudab märki, kui 2 rida või veergu vahetatakse. Vaatame seda väikese näitega:

3. Transponeeritud maatriksi determinant on võrdne algmaatriksi determinandiga.
4. Determinant on null, kui ühe rea elemendid on võrdsed teise rea vastavate elementidega (ka veergude puhul). Selle determinantide omaduse lihtsaim näide on:

5. Determinant on null, kui selle 2 rida on võrdelised (ka veergude puhul). Näide (ridad 1 ja 2 on proportsionaalsed):

6. Determinandi märgist saab välja võtta rea (veeru) ühisteguri.

7) Determinant ei muutu, kui ühe rea (veeru) elemendid liidetakse teise rea (veeru) vastavatele elementidele, korrutades sama väärtusega. Vaatame seda näitega:

Vaatamisi: 57258
Determinant (aka determinant (determinant)) leidub ainult ruutmaatriksites. Determinant pole midagi muud kui maatriksi kõiki elemente ühendav väärtus, mis säilib ridade või veergude transponeerimisel. Seda saab tähistada kui det(A), |A|, Δ(A), Δ, kus A võib olla nii maatriks kui ka seda tähistav täht. Saate selle leida erinevatel viisidel:
Kõiki ülal pakutud meetodeid analüüsitakse kolme või suurema suurusega maatriksitel. Kahemõõtmelise maatriksi determinant leitakse kolme elementaarse matemaatilise tehte abil, seetõttu ei kuulu kahemõõtmelise maatriksi determinandi leidmine ühegi meetodi alla. Noh, välja arvatud lisana, aga sellest hiljem.
Leidke 2x2 maatriksi determinant:
Meie maatriksi determinandi leidmiseks on vaja lahutada ühe diagonaali arvude korrutis teisest, nimelt
Näiteid teist järku maatriksite determinandi leidmisest
Rea/veeru lagunemine
Maatriksis on valitud mis tahes rida või veerg. Iga arv valitud real korrutatakse arvuga (-1) i+j, kus (i,j on selle numbri rea, veeru number) ja korrutatakse teist järku determinandiga, mis koosneb ülejäänud elementidest pärast i kustutamist - rida ja j - veerg. Heidame pilgu maatriksile
- Valige rida/veerg
Näiteks võtke teine rida.
Märge: Kui pole selgesõnaliselt märgitud, millise reaga determinant leida, valige rida, millel on null. Arvutusi tuleb vähem.
- Koostage väljend
Pole raske kindlaks teha, et arvu märk muutub igal teisel korral. Seetõttu saate ühikute asemel juhinduda järgmisest tabelist:
- Muudame oma numbrite märki
- Leiame oma maatriksite determinandid
- Me kaalume seda kõike
Lahenduse saab kirjutada nii:
Näited determinandi leidmiseks rea/veeru laiendamise järgi:
Kolmnurkseks taandamise meetod (kasutades elementaarteisendusi)
Determinant leitakse maatriksi viimisel kolmnurksele (astmelisele) kujule ja põhidiagonaalil olevate elementide korrutamisel
Kolmnurkne maatriks on maatriks, mille diagonaali ühel küljel olevad elemendid on võrdsed nulliga.
Maatriksi koostamisel pidage meeles kolme lihtsat reeglit:
- Iga kord, kui stringe vahetatakse, muudab determinant märgi vastupidiseks.
- Ühe rea korrutamisel / jagamisel nullist erineva arvuga tuleks see jagada (kui korrutada) / korrutada (jagamisel) või teha see toiming saadud determinandiga.
- Ühe arvuga korrutatud stringi lisamisel teisele stringile determinant ei muutu (korrutatud string võtab oma algse väärtuse).
Proovime saada nullid esimesse veergu, seejärel teise.
Vaatame oma maatriksit:
Ta-a-ak. Arvutamise meeldivamaks tegemiseks sooviksin, et kõige lähem number oleks peal. Võite selle jätta, kuid te ei pea seda tegema. Olgu, meil on teisel real kaks ja esimesel neli.
Vahetame need kaks rida.
Vahetasime read, nüüd peame kas muutma ühe rea märki või muutma determinandi märki lõpus.
Determinandid. Determinantide arvutamine (lk 2)
Teeme seda hiljem.
Nüüd, et saada esimeses reas null, korrutame esimese rea 2-ga.
Lahutage 1. rida teisest.
Vastavalt meie 3. reeglile tagastame algse stringi algasendisse.
Nüüd teeme 3. reale nulli. Esimese rea saame korrutada 1,5-ga ja lahutada kolmandast, kuid murdudega töötamine pakub vähe naudingut. Seetõttu leiame arvu, milleni saab mõlemat stringi taandada - see on 6.
Korrutage 3. rida 2-ga.
Nüüd korrutame 1. rea 3-ga ja lahutame kolmandast.
Anname oma 1. rea tagasi.
Ärge unustage, et me korrutasime 3. rea 2-ga, seega jagame determinandi 2-ga.
Seal on üks veerg. Nüüd, et saada teises nullid - unustame 1. rea - töötame 2. reaga. Korrutage teine rida -3-ga ja lisage see kolmandale.
Ärge unustage teist rida tagastada.
Seega oleme loonud kolmnurkse maatriksi. Mis meil üle jääb? Ja jääb üle põhidiagonaali numbrite korrutamine, mida me teeme.
Noh, jääb üle meeles pidada, et peame jagama oma determinandi 2-ga ja muutma märki.
Sarruse reegel (kolmnurkade reegel)
Sarruse reegel kehtib ainult kolmandat järku ruutmaatriksite puhul.
Determinant arvutatakse nii, et liidetakse maatriksist paremal olevad kaks esimest veergu, korrutatakse maatriksi diagonaalide elemendid ja liidetakse need kokku ning lahutatakse vastanddiagonaalide summa. Oranžidest diagonaalidest lahutage lilla.
Kolmnurkade reegel on sama, ainult pilt on erinev.
Laplace'i teoreem, vt ridade ja veergude lagunemine
1.1. Kahe lineaarvõrrandi ja teist järku determinantide süsteemid
Vaatleme kahe tundmatuga lineaarse võrrandi süsteemi:
Koefitsiendid  tundmatuga
tundmatuga  ja
ja  neil on kaks indeksit: esimene näitab võrrandi numbrit, teine - muutuja arvu.
neil on kaks indeksit: esimene näitab võrrandi numbrit, teine - muutuja arvu.




Crameri reegel: Süsteemi lahendus leitakse abideterminantide jagamisel süsteemi põhideterminandiga
 ,
,

Märkus 1. Crameri reegli kasutamine on võimalik, kui süsteemi determinant  ei ole võrdne nulliga.
ei ole võrdne nulliga.
Märkus 2. Crameri valemeid saab üldistada ka kõrgemat järku süsteemideks.
Näide 1 Lahenda süsteem:  .
.
Lahendus.
 ;
;
 ;
;
 ;
;

Eksam:

Järeldus: Süsteem on õige:  .
.
1.2. Kolme lineaarvõrrandi ja kolmandat järku determinantide süsteemid
Vaatleme kolmest lineaarsest võrrandist koosnevat süsteemi kolme tundmatuga:

Tundmatute koefitsientidest koosnevat determinanti nimetatakse süsteemi kvalifikaator või põhikvalifikaator:
 .
.
Kui a  siis on süsteemil ainulaadne lahendus, mis määratakse Crameri valemitega:
siis on süsteemil ainulaadne lahendus, mis määratakse Crameri valemitega:

kus on määrajad  nimetatakse abistavateks ja saadakse determinandist
nimetatakse abistavateks ja saadakse determinandist  asendades selle esimese, teise või kolmanda veeru vabade süsteemiliikmete veeruga.
asendades selle esimese, teise või kolmanda veeru vabade süsteemiliikmete veeruga.
Näide 2 Lahendage süsteem  .
.
Moodustame peamised ja abideterminandid:

Jääb üle kaaluda kolmandat järku determinantide arvutamise reegleid. Neid on kolm: veeru lisamise reegel, Sarruse reegel ja laiendamise reegel.
a) Reegel kahe esimese veeru lisamiseks põhideterminandile:
![]()
Arvutamine toimub järgmiselt: põhidiagonaali elementide korrutised ja piki sellega paralleele lähevad nende märgiga, sekundaarse diagonaali elementide ja sellega paralleelsete elementide korrutised võetakse vastupidise märgiga.
b) Sarruse reegel:


Oma märgiga võtavad nad põhidiagonaali ja sellega paralleele elementide korrutised ning vastasnurgast võetakse puuduv kolmas element. Vastandmärgiga võtavad nad sekundaarse diagonaali elementide korrutised ja piki sellega paralleele võetakse vastasnurgast kolmas element.
c) Rea või veeru elementide järgi laiendamise reegel:
Kui a  , siis.
, siis.
Algebraline liitmine on madalamat järku determinant, mis saadakse vastava rea ja veeru kustutamisel ning märgi arvestamisel  , kus
, kus  - rea number
- rea number  - veeru number.
- veeru number.
Näiteks,
 ,
,
 ,
,
 jne.
jne.
Arvutame selle reegli järgi abideterminandid  ja
ja  , laiendades neid esimese rea elementide võrra.
, laiendades neid esimese rea elementide võrra.

Olles arvutanud kõik determinandid, leiame muutujad Crameri reegli järgi:

Eksam:

Järeldus: süsteem on õige: .
Determinantide põhiomadused
Tuleb meeles pidada, et määraja on number, leitud teatud reeglite järgi. Selle arvutamist saab lihtsustada, kui kasutada põhiomadusi, mis kehtivad mis tahes järjestuse determinantide jaoks.
Vara 1. Determinandi väärtus ei muutu, kui kõik selle read asendatakse vastavate veergudega ja vastupidi.

Ridade asendamist veergudega nimetatakse transponeerimiseks. Sellest omadusest järeldub, et iga väide, mis on tõene determinandi ridade puhul, kehtib ka selle veergude puhul.
Vara 2. Kui determinandis on kaks rida (veeru) vahetatud, muutub determinandi märk vastupidiseks.

Vara 3. Kui determinandi mis tahes rea kõik elemendid on võrdsed 0-ga, siis on determinant 0-ga.
Vara 4.
Kui determinandi stringi elemendid korrutatakse (jagatakse) mingi arvuga  , siis determinandi väärtus suureneb (väheneb) aastal
, siis determinandi väärtus suureneb (väheneb) aastal  üks kord.
üks kord.

Kui mõne rea elementidel on ühine tegur, siis saab selle determinandi märgist välja võtta.

Vara 5. Kui determinandil on kaks võrdset või võrdelist rida, siis on selline determinant võrdne 0-ga.
Vara 6. Kui determinandi mis tahes rea elemendid on kahe liikme summa, siis on determinant võrdne kahe determinandi summaga.

Vara 7. Determinandi väärtus ei muutu, kui mõne rea elemendid liidetakse teise rea elementidega, korrutades sama arvuga.
Selles determinandis liideti kõigepealt teisele reale kolmas, korrutatuna 2-ga, seejärel lahutati teine kolmandast veerust, misjärel liideti teine rida esimesele ja kolmandale, mille tulemusena saime palju nullid ja lihtsustas arvutust.
Elementaarne teisendusi determinanti nimetatakse selle lihtsustusteks nende omaduste kasutamise tõttu.
Näide 1 Arvuta determinant

Otsene loendamine vastavalt ühele ülaltoodud reeglitest toob kaasa tülikad arvutused. Seetõttu on soovitatav kasutada järgmisi omadusi:
a) lahutage esimesest reast teine rida, korrutatuna 2-ga;
b) lahutage teisest reast kolmas rida, korrutatuna 3-ga.
Selle tulemusena saame:

Laiendame seda determinanti esimese veeru elementide osas, mis sisaldavad ainult ühte nullist erinevat elementi.
 .
.
Kõrgemate tellimuste süsteemid ja määrajad
süsteem  lineaarvõrrandid
lineaarvõrrandid  Tundmatuid saab kirjutada järgmiselt:
Tundmatuid saab kirjutada järgmiselt:

Sel juhul on võimalik koostada ka põhi- ja abideterminandid ning määrata tundmatud Crameri reegli järgi. Probleem on selles, et kõrgemat järku determinante saab arvutada ainult järjekorda langetades ja kolmandat järku determinantideks taandades. Seda saab teha nii otsese rea- või veeruelementideks lagundamise kui ka esialgsete elementaarteisenduste ja edasise lagundamisega.
Näide 4 Arvutage neljandat järku determinant

Lahendus leida kahel viisil:
a) otsese laiendamisega üle esimese rea elementide:

b) eelteisenduste ja edasise lagundamise teel
|
|
a) lahutada realt 1 rida 3 |
|
|
b) lisada IV reale rida II |


Näide 5 Arvutage viiendat järku determinant, saades kolmandas reas nullid neljanda veeru abil
|
|
lahutage esimesest reast teine, lahutage kolmas kolmandast ja lahutage neljandast teine korrutatuna 2-ga. |


lahutage teisest veerust kolmas: 
lahutage teisest realt kolmas: 
Näide 6 Lahenda süsteem:

Lahendus. Koostame süsteemi determinandi ja determinantide omadusi kasutades arvutame selle:

(esimesest reast lahutame kolmanda ja seejärel saadud kolmanda järgu determinandist kolmandast veerust lahutame esimese, korrutatuna 2-ga). Determinant  , seetõttu on rakendatavad Crameri valemid.
, seetõttu on rakendatavad Crameri valemid.
Arvutame ülejäänud determinandid:


Neljas veerg korrutatakse 2-ga ja lahutatakse ülejäänud osast


Neljas veerg lahutati esimesest ja seejärel korrutati 2-ga teisest ja kolmandast veerust.


 .
.
Siin viidi läbi samad teisendused mis  .
.

 .
.
Kui leiti  esimene veerg korrutati 2-ga ja lahutati ülejäänud osast.
esimene veerg korrutati 2-ga ja lahutati ülejäänud osast.
Crameri reegli kohaselt on meil:
Pärast leitud väärtuste asendamist võrranditesse veendume, et süsteemi lahendus on õige.
2. MAATRIKSID JA NENDE KASUTAMINE
LINEAARSÜSTEEMIDE LAHENDAMISES
M lineaarvõrrandi süsteem n tundmatuga nimetatakse vormisüsteemiks
kus aij ja b i (i=1,…,m; b=1,…,n) on mõned teadaolevad numbrid ja x 1,…,x n- teadmata. Koefitsientide tähistuses aij esimene indeks i tähistab võrrandi arvu ja teist j on tundmatu arv, mille juures see koefitsient on.
Tundmatute koefitsiendid kirjutatakse maatriksi kujul  , mida me kutsume süsteemi maatriks.
, mida me kutsume süsteemi maatriks.
Arvud võrrandite paremal küljel b 1,…,b m helistas tasuta liikmed.
Agregaat n numbrid c 1,…,c n helistas otsus selle süsteemi võrrand, kui süsteemi iga võrrand muutub pärast arvude asendamist võrduseks c 1,…,c n vastavate tundmatute asemel x 1,…,x n.
Meie ülesandeks jääb süsteemile lahenduste leidmine. Sel juhul võib tekkida kolm olukorda:
Nimetatakse lineaarvõrrandisüsteemi, millel on vähemalt üks lahend liigend. Vastasel juhul, st. kui süsteemil pole lahendusi, siis kutsutakse seda Sobimatu.
Kaaluge viise, kuidas süsteemile lahendusi leida.
MAATRIKS-MEETOD LINEAARSÜSTEEMIDE LAHENDAMISEKS
Maatriksid võimaldavad lühidalt kirja panna lineaarvõrrandisüsteemi. Olgu antud 3 võrrandi süsteem kolme tundmatuga:
Mõelge süsteemi maatriksile  ning tundmatute ja vabade liikmete maatriksveerud
ning tundmatute ja vabade liikmete maatriksveerud 
Otsime toote üles
need. korrutise tulemusena saame selle süsteemi võrrandite vasakpoolsed küljed. Siis, kasutades maatriksvõrdsuse definitsiooni, saab selle süsteemi kirjutada järgmiselt
 või lühem A∙X = B.
või lühem A∙X = B.
Siin maatriksid A ja B on teada ja maatriks X teadmata. Ta tuleb üles leida, sest. selle elemendid on selle süsteemi lahendus. Seda võrrandit nimetatakse maatriksvõrrand.
Olgu maatriksi determinant erinev nullist | A| ≠ 0. Seejärel lahendatakse maatriksvõrrand järgmiselt. Korrutage vasakpoolse võrrandi mõlemad pooled maatriksiga A-1, maatriksi pöördväärtus A: . Kuna A -1 A = E ja E∙X = X, siis saame maatriksvõrrandi lahendi kujul X = A -1 B .
Pange tähele, et kuna pöördmaatriksit saab leida ainult ruutmaatriksite jaoks, saab maatriksmeetodiga lahendada ainult need süsteemid, milles võrrandite arv on sama, mis tundmatute arv. Süsteemi maatriksmärkimine on aga võimalik ka juhul, kui võrrandite arv ei võrdu tundmatute arvuga, siis maatriks A ei ole ruudukujuline ja seetõttu on vormis võimatu süsteemile lahendust leida X = A -1 B.
Näited. Lahendage võrrandisüsteeme.

CRAMERI REEGEL
Vaatleme kolmest lineaarsest võrrandist koosnevat süsteemi kolme tundmatuga:
Süsteemi maatriksile vastav kolmandat järku determinant, s.o. koosneb koefitsientidest tundmatute juures,

helistas süsteemi määraja.
Koostame veel kolm determinanti järgmiselt: asendame järjestikku 1, 2 ja 3 veergu determinandis D vabade liikmete veeruga.

Siis saame tõestada järgmise tulemuse.
Teoreem (Crameri reegel). Kui süsteemi determinant on Δ ≠ 0, siis on vaadeldaval süsteemil üks ja ainult üks lahend ning
![]()
Tõestus. Niisiis, kaaluge kolmest võrrandist koosnevat süsteemi kolme tundmatuga. Korrutage süsteemi 1. võrrand algebralise täiendiga A 11 element a 11, 2. võrrand - sees A21 ja 3. - sisse A 31:

Lisame need võrrandid:
Mõelge selle võrrandi igale sulgule ja paremale küljele. Teoreemiga determinandi laienemisest 1. veeru elementide osas
Samamoodi võib näidata, et ja .
Lõpuks on seda lihtne näha 
Seega saame võrdsuse: .
Järelikult,.
Võrdused ja tuletatakse sarnaselt, millest järgneb teoreemi väide.
Seega märgime, et kui süsteemi determinant on Δ ≠ 0, siis on süsteemil unikaalne lahendus ja vastupidi. Kui süsteemi determinant on võrdne nulliga, siis süsteemil on kas lõpmatu hulk lahendeid või puuduvad lahendid, s.t. Sobimatu.
Näited. Lahendage võrrandisüsteem

GAUSSi MEETOD
Eelnevalt käsitletud meetoditega saab lahendada ainult neid süsteeme, milles võrrandite arv ühtib tundmatute arvuga ning süsteemi determinant peab olema nullist erinev. Gaussi meetod on universaalsem ja sobib suvalise arvu võrranditega süsteemide jaoks. See seisneb tundmatute järjestikuses eemaldamises süsteemi võrranditest.
Vaatleme uuesti kolmest võrrandist koosnevat süsteemi kolme tundmatuga:
 .
.
Jätame esimese võrrandi muutmata ning alates 2. ja 3. jätame sisaldavad terminid välja x 1. Selleks jagame teise võrrandi arvuga a 21 ja korrutage -ga a 11 ja seejärel lisage 1. võrrandiga. Samamoodi jagame kolmanda võrrandi a 31 ja korrutage -ga a 11 ja seejärel lisage see esimesele. Selle tulemusena on algne süsteem järgmine:
Nüüd eemaldame viimasest võrrandist termini, mis sisaldab x 2. Selleks jagage kolmas võrrand , korrutage ja lisage see teisega. Siis saame võrrandisüsteemi:

Seetõttu on seda lihtne leida viimasest võrrandist x 3, siis 2. võrrandist x 2 ja lõpuks alates 1. x 1.
Gaussi meetodi kasutamisel saab võrrandeid vajadusel omavahel vahetada.
Sageli piirduvad nad uue võrrandisüsteemi kirjutamise asemel süsteemi laiendatud maatriksi väljakirjutamisega:

ja seejärel viia see elementaarteisenduste abil kolmnurk- või diagonaalkujule.
To elementaarsed teisendused maatriksid sisaldavad järgmisi teisendusi:
- ridade või veergude permutatsioon;
- stringi korrutamine nullist erineva arvuga;
- ühele reale teiste ridade lisamine.
Näited: Võrrandisüsteemide lahendamine Gaussi meetodil.

Seega on süsteemil lõpmatu arv lahendusi.
Süsteemi nimetatakse homogeenseks, kui kõik selles olevad vabad liikmed on võrdsed nulliga. Kui sellisel homogeensel süsteemil on iseloomulikud determinandid, koosneb nende viimane veerg nullidest ja need kõik on võrdsed nulliga. On üsna ilmne, et igal homogeensel süsteemil on lahendus
mida me edaspidi nimetame nulliks.
Homogeense süsteemi puhul on põhiküsimuseks see, kas sellel on muid lahendeid kui null, ja kui jah, siis milline on kõigi selliste lahenduste hulk. Mõelge esmalt juhtumile, kui võrrandite arv on võrdne tundmatute arvuga. Süsteem näeb välja selline:

Kui selle süsteemi determinant erineb nullist, siis Crameri teoreemi järgi on sellel süsteemil üks kindel lahend, nimelt antud juhul nulllahend. Kui see determinant on võrdne nulliga, on koefitsientide tabeli aste k väiksem kui tundmatute arv ja seetõttu jäävad (n - k) tundmatute väärtused täiesti suvaliseks ja meil on loendamatu nullist erinevate lahenduste komplekt. Seega jõuame järgmise põhiteoreemini:
Teoreem I. Et süsteemil (14) oleks nullist erinev lahend, on vajalik ja piisav, et selle determinant oleks võrdne nulliga.
Tõmbame paralleeli tulemuste vahel, mille saime mittehomogeense süsteemi (1) ja homogeense süsteemi (14) kohta. Kui süsteemi determinant on nullist erinev, siis on ebahomogeensel süsteemil (1) üks kindel lahend ja homogeensel süsteemil ainult nulllahend. Kui süsteemi determinant on võrdne nulliga, siis on homogeensel süsteemil (14) lahendid, mis erinevad nullist, kuid sellisel tingimusel ei ole mittehomogeensel süsteemil (1) üldiselt üldse lahendust, sest järjekorras et sellel oleks lahendus, on vaja, et selle vabad terminid oleksid valitud nii, et need kaoksid kõik iseloomulikud determinandid. Ülaltoodud tulemuste paralleelsus mängib edaspidises olulist rolli. Füüsika küsimustes puutuvad kokku homogeensed süsteemid loomulike võnkumiste ja ebahomogeensete süsteemidega sundvõnkumiste puhul ning ülaltoodud juhtum, kus determinand on võrdne nulliga, iseloomustab loomulike võnkumiste olemasolu homogeense süsteemi korral ja resonants ebahomogeense süsteemi jaoks.
Nüüd käsitleme üksikasjalikumalt süsteemi (14) lahendusi, kui selle põhideterminant on võrdne nulliga. Olgu k selle koefitsientide tabeli auaste ja ilmselt . Eelmises väljaandes tõestatud teoreemi kohaselt tuleb võtta need k võrrandid, mis sisaldavad peadeterminanti, ja lahendada need k tundmatu jaoks.
Oletame üldistust kaotamata, et need tundmatud on . Lahendused näevad välja sellised:
kus teatud arvulised koefitsiendid ja võivad võtta suvalisi väärtusi.
Märgime süsteemi (14) lahenduse üht üldist omadust, mis tuleneb otseselt selle süsteemi lineaarsusest ja homogeensusest ning mida võib nimetada lahenduste pealesurumise printsiibiks, nimelt kui meil on süsteemil mitu lahendit:
siis korrutades need suvaliste konstantidega ja liites, saame ka süsteemi lahenduse
Toimides samamoodi nagu lineaarsete diferentsiaalvõrrandite puhul, nimetame lahendusi (16) lineaarselt sõltumatuteks, kui konstantidel Q pole väärtusi, mille hulgas on nullist erinevaid, nii et mis tahes s-i korral võetakse võrrandid. koht:

Süsteemi lineaarselt sõltumatuid lahendusi on lihtne konstrueerida nii, et korrutades need suvaliste konstantidega ja liites, saame süsteemi kõik lahendid. Tõepoolest, pöördume valemite (15) poole, mis annavad süsteemi üldlahenduse, ja konstrueerime nende valemite põhjal lahendused järgmiselt: esimeses lahendis seame ja kõik ülejäänud võrdub nulliga; teises lahendis seame a ja kõik teised võrdseks nulliga jne ning lõpuks viimases lahenduses kõik teised võrdseks nulliga. On lihtne näha, et konstrueeritud lahendid on lineaarselt sõltumatud, kuna igaüks neist sisaldab ühega võrdset tundmatut, mis teistes lahendustes on võrdne nulliga. Tähistame saadud lahendusi järgmiselt.