Merenje uglova nagiba i nagiba, merenje klizanja. Pogledajte šta je “Roll” u drugim rječnicima. Sprečavanje prevrtanja broda
Na njegovoj strani) - odstupanje ravnine simetrije aviona od lokalne vertikale do površine zemlje. Karakteriziraju ga K ugao i K brzina. Ugao prevrtanja(γ) - ugao između poprečne ose OZ i normalne ose OZ(m) ( cm. koordinatni sistem) pomaknut na poziciju gdje je ugao skretanja jednak nuli. Ugao K se smatra pozitivnim kada je os OZg poravnata sa osom OZ rotacijom u smjeru kazaljke na satu oko ose OX kada se gleda duž ove ose. Prilikom određivanja orijentacije koordinatnog sistema brzine (SV) u odnosu na normalni, koristi se ugao brzine kotrljanja(γ)a, definiran slično kutu (γ), ali umjesto OZ ose, uzima se u obzir bočna OZa os. Kada opisuju kretanje raketa koje koriste aerodinamički ugao nagiba(φ)n, definisan kao ugao između ose OY i OYn CK ose povezane sa prostornim napadnim uglom.
Kotrljanje aviona je također naziv za kretanje u kojem se mijenja ugao nagiba; okarakterisan roll rate(ω)x - projekcija ugaone brzine aviona na njegovu uzdužnu osu. Brzina rotacije se smatra pozitivnom kada se avion rotira u smjeru kazaljke na satu oko ose OX. Prilikom analize K. često koriste bezdimenzionalna brzina K. -(ω)x, povezan sa brzinom K. relacijom
(ω) = (ω)xl/2V,
gdje je l avion, V je brzina leta.
Bezdimenzionalna brzina K se takođe naziva ugao spirale opisan vrhom krila.
Manevri aviona se koriste, na primjer, tokom zaokreta, prilikom izvođenja akrobatskih manevara i prilikom prilaza na slijetanje kako bi se spriječilo pomicanje putanje aviona u odnosu na osu piste. Upravljanje mjenjačem vrši se bočnim kontrolnim tijelima ( cm. kontrole). Spontani let aviona naziva se pad. Cm. takođe bočno kretanje.
Vazduhoplovstvo: Enciklopedija. - M.: Velika ruska enciklopedija. Glavni i odgovorni urednik G.P. Svishchev. 1994 .
Sinonimi:
Pogledajte šta je "Kren" u drugim rječnicima:
banka- rolati, i... Ruski pravopisni rječnik
banka- rolati / ... Morfemsko-pravopisni rječnik
banka- a, m. carène f., engleski. Carren, gol krengen 1. mor. Podvodni ili donji dio ili površina plovila na vodenoj liniji. Marine Science. 386. // Sl. 18 10 249. 2. Nagib plovila na jednu stranu. Sl. 18. Okret prilikom testiranja nagiba s puškama se donekle smanjio. CSF 2 30 ... Istorijski rečnik galicizama ruskog jezika
Modeli aviona Kren (od francuskog carène keel, podvodni dio broda ili od engleskog kren gen ... Wikipedia
- (engleski careen, od latinskog carina - podvodni dio broda). Stanje broda na nagibu, skretanje broda zbog vjetra ili zbog prenošenja težine na jednu stranu, za podvodne popravke. Rečnik stranih reči uključenih u ruski jezik....... Rečnik stranih reči ruskog jezika
Cm … Rečnik sinonima
Kren, roll, muž. (specijalista.). 1. Naginjanje broda ili aviona na bok. Parobrod se kreće sa jakom listom. Okrenite se (nagib). 2. transfer Pristrasnost, promjena političke orijentacije (novine). Austrijski socijalisti su napravili veliki pomak udesno... Ushakov's Explantatory Dictionary
A; m. 1. Bočni nagib broda ili aviona. Dajte brodski K. K. povećanja. 2. Promjena smjera, zaokret u političkom, društvenom, itd. aktivnosti. K. lijevo, desno. Odvedi ga na stranu. * * * ROLL ROLL (od holandskog krengen - položiti brod na ... ... enciklopedijski rječnik
KREN, ah, muž. 1. Naginjanje na jednu stranu (broda, aviona, vozila). Dajte.. Stavite avion u sobu 2. transfer. Jednostrana promjena smjera. Ozhegov rečnik objašnjenja. S.I. Ozhegov, N.Yu. Shvedova. 1949 1992 … Ozhegov's Explantatory Dictionary
ROLL, vidi petu. Dahl's Explantatory Dictionary. IN AND. Dahl. 1863 1866 … Dahl's Explantatory Dictionary
- (Lista, peta, nagib) 1. Poprečni nagib plovila. 2. Nagib aviona oko uzdužne ose. 3. Podvodni dio broda uz vodenu liniju (stari). Samoilov K.I. Morski rječnik. M.L.: Državna pomorska izdavačka kuća NKVMF SSSR-a ... Pomorski rječnik
Knjige
- Moja pitoma obalo, Krenev P.. Knjiga slavnog modernog prozaika obuhvata dela koja govore o životu na ruskom severu o savremenim Pomorima koji naseljavaju obale Belog mora. Ovo je pouzdana, istinita priča...
Razmotrimo kretanje tereta težine ρ na brodu u poprečno-horizontalnom smjeru na desnu stranu na udaljenosti l y. Ovo kretanje tereta će uzrokovati kotrljanje i pomicanje centra gravitacije. plovila u smjeru paralelnom s linijom kretanja tereta ρ. Početna bočna stabilnost se u ovom slučaju neće promijeniti, jer primjenjuje Ts.V. i C.T., kao i metacentrični radijus i metacentrična visina neće dobiti nikakav prirast. Gravitacija plovila primijenjena u novom C.T. i sila potpore primijenjena u novom C.E. djelovat će duž iste vertikale, okomito na novu vodenu liniju B 1 L 1.
Rice. 1
U isto vrijeme, brod zauzima novi ravnotežni položaj, naginjući se pod uglom. Iz slike proizlazi da se trenutak koji nastaje kao rezultat kretanja tereta preko posude može odrediti iz izraza:
Mkr=P lu cos θ
Moment ispravljanja može se odrediti metacentričnom formulom stabilnosti. Posuda je u ravnoteži pod uticajem modifikovanog sistema sila, pa su momenti Mcr i Mθ takođe jednaki:
R·lu·cos θ=D'·h·sin θ
Rješavajući ovu jednačinu za θ, dobijamo formulu za određivanje ugla kotrljanja pri poprečnom kretanju tereta:
tgΘ=R·luD'·h
Pošto je ugao kotrljanja mali, poslednji izraz se može napisati kao:
Θ=R·luD'·h
Gornja formula se koristi u slučajevima kada uglovi nagiba ne prelaze 10-15 stepeni.
Promjena stabilnosti broda pri vertikalnom pomicanju tereta
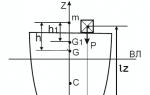
Pretpostavimo da se na brodu koji sjedi na ravnoj kobilici iu ravnoteži teret težine P pomiče okomito na udaljenost l z. Budući da se deplasman plovila ne mijenja zbog kretanja tereta, prvi uvjet ravnoteže će biti zadovoljen (plovilo će zadržati svoj gaz). Prema poznatoj teoremi teorijske mehanike, C.T. plovilo će se kretati do tačke G 1, koja se nalazi na istoj vertikali sa prethodnim položajem težišta. plovilo G. Sama vertikala će proći, kao i do sada, kroz Ts.V. plovilo C. Dakle, drugi uvjet ravnoteže će biti ispunjen, dakle, uz vertikalno kretanje tereta, brod neće promijeniti svoj ravnotežni položaj (neće se pojaviti kotrljanje ili trim).
 Rice. 2
Rice. 2
Razmotrimo sada promjenu početne bočne stabilnosti. Zbog činjenice da se oblik trupa broda potopljenog u vodu i oblik područja vodene linije nisu promijenili, položaj Ts.V. a poprečni metacentar (t. m) ostaje nepromijenjen kada se teret pomiče okomito. Samo se C.T. plovilo od tačke G do tačke G 1. Segment GG 1 se može naći pomoću izraza:
Ako je prije pomjeranja tereta poprečna metacentrična visina bila h, onda će se nakon pomicanja promijeniti za vrijednost GG 1. U našem slučaju, promjena poprečne metacentrične visine Δh = GG 1 ima negativan predznak, budući da je kretanje C.T. posuda prema poprečnom metacentru, čiji položaj, kako smo utvrdili, ostaje nepromijenjen, smanjuje metacentričnu visinu. Stoga će nova vrijednost poprečne metacentrične visine biti:
h1=h-R lzD (1)
Očigledno, u slučaju pomjeranja tereta prema dolje, ispred drugog člana na desnoj strani jednačine nove metacentrične visine h1 mora se staviti znak plus (+).
Iz izraza (1) proizlazi da je smanjenje stabilnosti plovila proporcionalno umnošku mase tereta i njegovog kretanja po visini. Osim toga, pod svim ostalim jednakim uvjetima, promjena bočne stabilnosti će biti relativno manja za brod velikog deplasmana nego za brod s malim D. Stoga je na velikim brodovima kretanje relativno velikih tereta sigurnije nego na brodu s malim D. malih brodova.
Može se ispostaviti da se vrijednost GG 1 pomiče na gore C.T. posuda će biti veća od same vrijednosti h. Tada će početna bočna stabilnost postati negativna, odnosno brod neće moći ostati u uspravnom položaju.
Promjena stabilnosti plovila od prijema ili uklanjanja (istovara) tereta
Općenito, prilikom prijema ili uklanjanja tereta dolazi do promjene prosječnog gaza plovila zbog promjene deplasmana, pojave kotrljanja i trima zbog pomaka linije djelovanja sile težine u odnosu na liniju. djelovanja sile uzgona i promjene stabilnosti kao rezultat promjene položaja centra. i Ts.V.
Problem uticaja na pristajanje i stabilnost plovila da primi teret težine P u bilo kojoj tački A sa koordinatama Xp, Yp, Zp može se podijeliti na dva jednostavnija problema.
Prvi od njih razmatra uticaj na sletanje i stabilnost prihvatanja tereta težine P, ako C.T. prihvaćeni teret se nalazi u DP i na istoj vertikali sa težištem područja efektivne vodene linije.
U drugom problemu razmatramo promjenu prizemljenja plovila kada se isti teret prebacuje horizontalno. Takav prijenos, kao što je ranije pokazano, ne utječe na početnu stabilnost, pa se u nastavku razmatra samo prvi problem.
Teret težine P, C.T. je prihvaćen na palubu plovila. koji se nalazi u DP na udaljenosti zr od glavne ravni. Prije prijema tereta, brod je imao deplasman Do i gaz T. Nakon prijema tereta, deplasman broda je postao D 1 = D + P, a gaz T 1 = T + ΔT. Prilikom primanja opterećenja, sve tri točke koje karakteriziraju bočnu stabilnost mijenjaju položaj; centar veličine - zbog promjene gaza plovila, a time i oblika volumena trupa plovila potopljenog u vodu; centar gravitacije - zbog promjene opterećenja broda, i poprečni metacentar - zbog promjene oblika površine vodene linije i volumena dijela brodskog trupa uronjenog u vodu.
Metacentrična visina, koja karakteriše stabilnost plovila, zbog svih navedenih razloga će dobiti sljedeću promjenu:
∆h=PD+P(T+∆T2h-Zp)
Nova vrijednost poprečne metacentrične visine nakon primanja ili skidanja (trošenja) opterećenja bit će:
h1=h+∆h=h+±PD±P(T±∆T2-h-Zp)
Ovdje znak plus odgovara prihvatanju tereta, znak minus njegovom uklanjanju (trošku).
Predloženo čitanje:
KONSTRUKCIJA VERTIKALE POMOĆU FIZIČKOG KLATNA U AVIONU
Kada upravljate avionom, morate znati njegovu poziciju u odnosu na ravan Zemljinog horizonta. Položaj aviona u odnosu na horizontalnu ravninu određuju dva ugla: ugao nagiba i ugao prevrtanja. Ugao nagiba je ugao između uzdužne ose aviona i horizontalne ravni, meren u vertikalnoj ravni. Ugao prevrtanja - ugao rotacije aviona oko njegove uzdužne ose, meren od vertikalne ravni koja prolazi kroz uzdužnu osu aviona
Slika 4.1 fizičko klatno - vertikalna determinanta na avionu.
Dakle, položaj aviona u odnosu na ravninu horizonta može se odrediti ako je na avionu poznat pravac prave vertikale, odnosno pravac linije koja prolazi kroz centar Zemlje i letelice, i devijacija aviona iz ovog pravca se meri.
Odstupanje od vertikale na tlu određuje se običnim viskom, odnosno fizičkim klatnom.
Pretpostavimo da je fizičko klatno ugrađeno na avion koji leti vodoravno uz ubrzanje A(Sl. 4.1). Na masu klatna T sile će djelovati od ubrzanja gravitacije g i inercijsku silu od ubrzanja a. Zbir momenata ovih sila u odnosu na tačku ovjesa klatna je nula i izražava se jednadžbom
Gdje l- dužina klatna;
α - ugao otklona klatna
Iz jednačine (4.1) imamo
![]() (4.2)
(4.2)
Posljedično, klatno postavljeno na objektu koji se kreće ubrzano skreće se u smjeru suprotnom djelovanju ubrzanja i pokazuje takozvanu "prividnu vertikalu". Savremeni transportni avioni mogu imati ubrzanja srazmerne po veličini sa ubrzanjem gravitacije, pa ugao α odstupanja klatna od vertikale može dostići značajne vrednosti. Dakle, fizičko klatno nije pogodno za određivanje smjera vertikalnog položaja, odnosno za mjerenje uglova prevrtanja i nagiba ako avion leti ubrzano.
AIRLINE HORIZONS
Prethodno je napomenuto da se klatno može koristiti za određivanje vertikale samo tokom leta bez ubrzanja, a slobodni žiroskop od tri stepena može zadržati zadati prostorni položaj, bez obzira na trenutna ubrzanja, samo na kratko.
Stoga su ova dva uređaja povezana zajedno, koristeći pozitivna svojstva svakog od njih. U nedostatku ubrzanja pomoću klatna, glavna os žiroskopa je postavljena okomito. U onim trenucima kada ubrzanja djeluju na klatno, ono se isključuje i žiroskop radi u "memorijskom" načinu rada.

Uređaj kojim klatno djeluje na žiroskop naziva se sistem korekcije klatna. Žiroskop s takvom korekcijom naziva se žirovertikalni. Žiro vertikala, koja vizuelno pokazuje položaj aviona u odnosu na horizont Zemlje, naziva se indikator položaja.
Indikatori stava koriste elektrolitičko klatno (slika 4.2), koje je ravna bakarna posuda 3, ispunjen provodljivom tečnošću 1 sa visokom električnom otpornošću. U posudi ima toliko tečnosti da ima mesta za vazdušni mehur 2 . Posuda je zatvorena poklopcem od izolacionog materijala u koji su montirana četiri kontakta 4, peti kontakt je sama posuda. Ako je klatno postavljeno horizontalno, tada su sva četiri kontakta ravnomjerno prekrivena tekućinom i električni otpor područja između njih i posude je isti. Ako se posuda nagne, tada će mjehur zraka, koji zauzima gornju poziciju u posudi, otkriti jedan od kontakata i time promijeniti električni otpor područja, koji je pod malim uglovima (do 30") proporcionalan kutu nagib posude.
 Kontakti klatna su uključeni u električno kolo, kao što je prikazano na sl. 4.3. Kada se klatno nagne, otpor između iglica 0 i 1 će biti veći od otpora između iglica 0 i 3. Tada će struja i 1 koji prolazi kroz kontrolni namotaj OY 1, bit će manja struja i 2 namota OY 2 korekcijski motor. Namotaji OY 1 i OY 2 su namotani protiv namotaja, tako da je razlika struje Δ i=i 2 -i 1 stvara magnetni tok, koji, u interakciji s magnetskim tokom namota polja, uzrokuje okretni moment. Rotor motora je fiksiran na os kardana, stoga se na os kardana primjenjuje moment pod čijim utjecajem žiroskop precesira. Precesija žiroskopa traje sve dok postoji moment duž ose kardanskog ovjesa, a taj moment djeluje dok se klatno ne postavi u horizontalni položaj, pri čemu struja i 1 =i 2. Povezivanjem klatna sa unutrašnjim ,
okvir kardanskog ovjesa i postavljanjem motora za korekciju duž osi ovjesa, dobijamo žirovertikalu sa elektromehaničkom korekcijom klatna (sl. 4.4). Dakle, elektrolitičko klatno 1
, djelujući na žiroskop preko motora za korekciju 2
I 3
, uvijek će dovesti glavnu osu žiroskopa u vertikalni položaj. Kada je korekcija isključena, žiroskop će zadržati svoju prethodnu poziciju u prostoru s preciznošću određenom vlastitim greškama, na primjer, zbog precesije uzrokovane trenucima trenja duž osi kardanskog zgloba.
Kontakti klatna su uključeni u električno kolo, kao što je prikazano na sl. 4.3. Kada se klatno nagne, otpor između iglica 0 i 1 će biti veći od otpora između iglica 0 i 3. Tada će struja i 1 koji prolazi kroz kontrolni namotaj OY 1, bit će manja struja i 2 namota OY 2 korekcijski motor. Namotaji OY 1 i OY 2 su namotani protiv namotaja, tako da je razlika struje Δ i=i 2 -i 1 stvara magnetni tok, koji, u interakciji s magnetskim tokom namota polja, uzrokuje okretni moment. Rotor motora je fiksiran na os kardana, stoga se na os kardana primjenjuje moment pod čijim utjecajem žiroskop precesira. Precesija žiroskopa traje sve dok postoji moment duž ose kardanskog ovjesa, a taj moment djeluje dok se klatno ne postavi u horizontalni položaj, pri čemu struja i 1 =i 2. Povezivanjem klatna sa unutrašnjim ,
okvir kardanskog ovjesa i postavljanjem motora za korekciju duž osi ovjesa, dobijamo žirovertikalu sa elektromehaničkom korekcijom klatna (sl. 4.4). Dakle, elektrolitičko klatno 1
, djelujući na žiroskop preko motora za korekciju 2
I 3
, uvijek će dovesti glavnu osu žiroskopa u vertikalni položaj. Kada je korekcija isključena, žiroskop će zadržati svoju prethodnu poziciju u prostoru s preciznošću određenom vlastitim greškama, na primjer, zbog precesije uzrokovane trenucima trenja duž osi kardanskog zgloba.
Sistemi korekcije razlikuju se po vrstama karakteristika. Karakteristika korekcije je zakon promjene momenta koji razvija korekcioni motor, u zavisnosti od odstupanja glavne ose žiroskopa od vertikalnog položaja.
U vazduhoplovnim instrumentima, karakteristika mešovite korekcije je najraširenija (slika 4.5). Površina ±Δ α definiše mrtvu zonu sistema. Do određenih ekstremnih uglova α itd,
β u trenutku korekcije M k varira proporcionalno uglovima α I β , a zatim postaje konstantan.
GREŠKE GIROVERTIKALA
Greška od momenata trenja u osi okvira i okvira. Neminovno postoje momenti trenja u osovinama kardana, pa se precesija žiroskopa pod uticajem momenata korekcije nastavlja sve dok je moment korekcije veći od momenta trenja. Kretanje žiroskopa prestaje kada su ovi momenti jednaki:
Iz toga slijedi da glavna os žiroskopa neće dostići vertikalnu poziciju pod uglovima α * I β *:

Dakle, zbog trenja u osovinama kardana, žirovertikala ima zonu stagnacije, koja zavisi od veličine momenta trenja u osovinama kardana i, prirodno, od mrtve zone korekcije klatna (vidi Sl. 4.5). Što je veći specifični moment koji razvijaju motori za korekciju, to je manja zona stagnacije. Preveliki određeni trenutak dovodi do značajnih grešaka u zavojima. Za indikatore stava, zona stagnacije je obično 0,5-1°.
Greška pri skretanju. Kada se avion okrene ugaonom brzinom ω, tada na klatno, pored sile gravitacije mg, centrifugalna sila je i dalje aktivna mω 2 R, a klatno nije postavljeno duž prave vertikale, već duž rezultante ovih sila (slika 4.7). Signali se šalju motorima za korekciju, a glavna os žiroskopa je postavljena u prividni vertikalni položaj. Ovaj proces se odvija brže, što su specifični momenti veći k x , k y sistemi korekcije. Kao što se može vidjeti sa slike 3.10, na krivini sistem bočne korekcije uglavnom ne radi ispravno. Stoga je u modernim žiro vertikalama i umjetnim horizontima bočna korekcija na zavojima onemogućena posebnim uređajem.
Naravno, linearna ubrzanja aviona, na primjer, s povećanjem brzine, također dovode do sličnih grešaka. Stoga je kod indikatora stava kao što je AGD-1 uzdužna korekcija također onemogućena. Kada je korekcija isključena, žirovertikala radi u “memory” modu. Nakon što avion završi evoluciju povezanu sa ubrzanjima, sistem korekcije se uključuje i dovodi glavnu osu žiroskopa u vertikalni položaj ako je odstupila tokom rada u režimu „memorije“.
Greška se pojavljuje u žirometrima kako zbog dnevne rotacije Zemlje tako i zbog vlastite brzine leta aviona, ali za transportne avione ova greška ne prelazi nekoliko minuta luka.
pojavit će se crvena zastavica 12. Ovaj prekidač povezuje upravljačke namotaje motora poprečne korekcije 4 sa fazom C, zaobilazeći otpor R2, i time se povećava

struja u motoru, a samim tim i korekcijski moment koji razvija.
Nakon što uređaj dostigne nominalni način rada, prekidač 10 treba vratiti u prvobitni položaj (zastava će nestati iz vidokruga). U nominalnom režimu rada, kontrolni namotaji motora za korekciju 4 spojen na fazu C preko kontakata korekcionog prekidača VK-53RB.. Kada letelica napravi zaokret, korektor isključuje motor poprečne korekcije, inače nastaje velika greška skretanja.
AIR HORIZONT AGI-1s
Indikator položaja je dizajniran da odredi položaj aviona u prostoru u odnosu na pravu liniju horizonta, ima ugrađen uređaj za indikator klizanja. Indikator položaja je instaliran na transportnim avionima civilnog vazduhoplovstva.
Kinematički dijagram uređaja prikazan je na sl. 4.8, pojednostavljeni električni - na Sl. 4.9, a pogled na skalu je na Sl. 4.10.

Razmotrimo rad uređaja. Vlastita os rotacije žiroskopa (vidi sliku 4.8) prema signalima elektrolitičkog klatna 8 pomoću motora za korekciju 3 I 10 instaliran i držan u vertikalnom položaju.
Posebna karakteristika AGI-lc indikatora položaja je njegova sposobnost da radi u neograničenom rasponu uglova prevrtanja i nagiba. To je moguće zahvaljujući korištenju dodatnog okvira za praćenje u uređaju. 4, čija se os poklapa sa uzdužnom osom aviona, a sam okvir se može rotirati u odnosu na avion pomoću motora 11 . Svrha dodatnog okvira za praćenje je da osigura okomitost na osu vlastite rotacije žiroskopa i na os vanjskog okvira kardana. Kada se avion kotrlja, vanjski okvir 5 Kardanski ovjes se rotira oko ose unutrašnjeg okvira. Ova rotacija je fiksirana prekidačem 9 (vidi slike 4.8 i 4.9), sa kojim se motor uključuje 11 , okrećući okvir pratioca 4 , a sa njim i okvir 5 u suprotnom smjeru. Dakle, okomitost vlastite ose žiroskopa 6 a osi vanjskog okvira nisu narušene. Kada avion vrši evoluciju nagiba pod uglovima većim od 90˚, koristeći prekidač 12 smjer rotacije motora se mijenja 11. Na primjer, ako avion napravi figuru „Nesterovljeve petlje“, tada u trenutku kada se nađe u obrnutom stanju, odnosno promijeni svoj položaj u odnosu na glavnu os žiroskopa za 180°, smjer rotacije motor 11 Da biste rotirali okvir pratioca, treba ga obrnuti.
Kada avion izvrši evoluciju koraka, avion se kotrlja oko ose vanjskog kardanskog okvira i stoga ima radni raspon od 360°.
Indikacija položaja aviona u odnosu na ravninu horizonta u AGI-1s se vrši pomoću siluete aviona (videti slike 4.8 i 4.10), postavljene na telo instrumenta, i sferne skale 2, spojen na os unutrašnjeg okvira 7 kardanskog ovjesa žiroskopa. Sferna skala 2 obojeno smeđom iznad linije horizonta i plavom ispod linije horizonta. Na braon polju je natpis „Spuštanje“, na plavom polju natpis „Uspon“. Tako će se prilikom penjanja silueta aviona, zajedno sa samim avionom, pomjeriti u plavo polje, kao što je prikazano na sl. 3.18, V, od skale 2, povezan sa žiroskopom, ostaće nepomičan u prostoru. Treba napomenuti da su očitavanja visine nagiba indikatora položaja AGI-lc suprotna onima kod AGB-2. Ovo je izuzetno važno jer su oba instrumenta ponekad instalirana na istom avionu.

Slika 4.9 električna šema indikatora položaja AGI-1.

Smanjenje vremena za početno poravnanje ose samorotacije žiroskopa u vertikalni položaj postiže se uzastopnim uključivanjem pobudnih namota motora za korekciju 3 I 10 sa statorskim namotajima žiromotora. Osim toga, na unutrašnjem okviru 7 nalazi se mehaničko klatno koje, kada uređaj nije uključen, drži sistem okvira na približno nuli
pozicija U istu svrhu koristi se mehanička brava, kada pritisnete dugme 15 pri čemu je (vidi sliku 4.10) dodatni prateći okvir postavljen u nulti položaj. Na dugmetu piše “Pritisnite prije pokretanja”. Da bi se smanjila greška skretanja indikatora položaja, motor poprečne korekcije 3 pri okretu se isključuje korektorom VK-53RB. Na prednjoj strani uređaja, na dnu, nalazi se indikator klizanja 13 a na lijevoj strani - ručka 14 za promjenu položaja siluete aviona.
AIR HORIZON AGD-1
Daljinski indikator položaja AGD-1 pruža posadi lako uočljivu indikaciju velikih razmjera položaja aviona u odnosu na ravninu pravog horizonta i
 obezbjeđuje potrošače (autopilot, sistem smjera, radarske stanice) električnim signalima proporcionalnim odstupanjima nagiba i nagiba aviona.
obezbjeđuje potrošače (autopilot, sistem smjera, radarske stanice) električnim signalima proporcionalnim odstupanjima nagiba i nagiba aviona.
AGD-1 se sastoji od dva uređaja: 1) trostepenog žiroskopa sa korekcijom klatna, koji se naziva žiro senzor, koji se postavlja što bliže težištu aviona; 2) indikatori postavljeni na instrument tabli posade. Na jedan žiro senzor mogu se povezati do tri indikatora.
Šematski elektromehanički dijagram AGD-1 prikazan je na sl. 4.12, pogled na skalu pokazivača prikazan je na Sl. 4.13

Slika 4.13 prednja strana indikatora položaja AGD-1.
Dugme 36-lock, 37-lamp, ostale oznake su iste kao na 4.12.
Žiro senzor je trostepeni žiroskop, čija je os vanjskog kardanskog okvira montirana u okvir za praćenje 7. Svrha okvira za praćenje je da osigura rad uređaja u neograničenom rasponu uglova. Prateći okvir 7 osigurava da os vlastite rotacije žiroskopa bude okomita na os vanjskog okvira ovjesa koristeći podatke indukcije
chica 3 i motor-generator 2, kontrolisano pojačivačem 1 . Sidro 5 senzor je fiksiran na osu unutrašnjeg okvira, a stator 3 čvrsto povezan sa spoljnim okvirom 8 kardanska suspenzija.
Prekidač 4 mijenja smjer rotacije motora 2, kada avion vrši evoluciju nagiba pod uglovima većim od 90°. Dakle, okvir za praćenje 7 obavlja iste funkcije kao u AGI-1s indikatoru položaja.
Posebnost sistema za praćenje kotrljanja za okvir 7 u indikatoru položaja AGD-1 je upotreba pojačala na bazi poluvodičkih elemenata i motora-generatora. Korekcija klatna AGD-1 je slična korekciji AGI-lc i AGB-2, ali se razlikuje po tome što se motor poprečne korekcije 6 može se isključiti ne samo prekidačem 17, kojim se upravlja preko korektivnog prekidača VK-53RB, ali i posebnim lamelnim uređajem (nije prikazano na dijagramu) pri rolni od 8-10°. Osim toga, motor uzdužne korekcije 10 kontrolisano elektrolitičkim klatnom 13 preko tečnog akcelerometra 16. To je uređaj sličan tekućem klatnu. Prilikom uzdužnog ubrzanja aviona, provodna tečnost se pod uticajem inercionih sila pomera na jedan od kontakata i usled povećanja električnog otpora kola korekcija je oslabljena za 50%.
Odstupanja nagiba i nagiba aviona mjere se žiro senzorom i prenose do pokazivača pomoću dva identična sistema za praćenje:
1) sistem za praćenje kotrljanja, koji se sastoji od sinhro senzora 9, sinhronizator-prijemnik 20, pojačalo 18 i motor-generator 19;
2) sistem za praćenje tona, koji uključuje: sinhro senzor 14, selsyn-receiver 23, pojačalo 24, motor-generator 25.

Prekidač 15 je uključen u sistem za praćenje nagiba radi ispravnog rada pod uglom većim od 90°. Karakteristika sistema za praćenje u AGD-1 je upotreba motor-generatora kao aktuatora. Motor-generator je električna mašina koja se sastoji od motora i generatora postavljenih na istoj osovini. Napon proizveden u generatoru je proporcionalan brzini motora. U servo sistemu, služi kao brzi povratni signal za prigušivanje oscilacija sistema. Generator motora 19 okreće brzinu 21 sa siluetom aviona 22 u odnosu na tijelo uređaja i motor-generator 25 rotira točkić za nagib 26,
ima dvobojnu boju: iznad linije horizonta - plava, ispod - smeđa. Dakle, indikacije su naznačene pokretnom siluetom aviona i pokretnom skalom nagiba.
Indikacija položaja aviona u odnosu na horizont u AGD-1 je prirodna, odnosno odgovara slici koju zamišlja posada o položaju aviona u odnosu na tlo. Grubo očitavanje rolne moguće je korišćenjem digitalizovane fiksne skale na telu instrumenta i silueti aviona; na skali 26 i silueta aviona su približno određene uglovima nagiba. Indikator AGD-1 indikatora za kotrljanje i korak je prikazan na Sl. 4.11. Po našem mišljenju, određivanje položaja aviona u AGD-1 je praktičnije nego u AGB-2 i AGI-1.
Indikator položaja AGD-1 koristi poseban uređaj nazvan odvodnik, koji vam omogućava da brzo dovedete okvir uređaja i žiromotor u strogo definiran položaj u odnosu na tijelo uređaja, a time i zrakoplova. Kinematički dijagram elektromehaničkog uređaja za daljinsko zaključavanje AGD-1 prikazan je na Sl. 4.14.
Uređaj radi na sljedeći način. Kada pritisnete crveno dugme 36 (vidi sliku 4.13), koji se nalazi na prednjoj strani indikatora, dovodi napon na motor 34 (vidi sliku 4.14. koja, rotirajući, uzrokuje da se štap pomjera naprijed 33 pomoću prsta koji se kreće duž proreza za vijke, tj. rotirajuća matica miruje, a vijak se kreće. Stock 33 putem videa 32 naslanja se na dodatni prateći okvir 7, koji ima klinasti prsten 35.
Zbog ovakvog profila prstena, kada postoji pritisak na okvir sa strane štapa, nastaje prsten 35 zajedno sa žiro jedinicom, rotira oko ose okvira 7 do valjka 32 neće biti u donjem položaju prstena. U ovom slučaju, ravnina okvira 7 je paralelna sa ravninom krila aviona. Sljedeća dionica 33 pomiče profilnu traku 31, koji se oslanja na šaku 30 i stvara moment oko ose vanjskog okvira 8. Pod uticajem ovog trenutka, žiroskop precesira oko ose unutrašnjeg okvira i dolazi do graničnika, nakon čega precesija prestaje i žiroskop počinje da se okreće oko ose spoljašnjeg okvira do izbočenja šipke. 31 neće stati u izrez brega 30, čime se fiksira okvir 8 u položaju u kojem je os unutrašnjeg okvira paralelna uzdužnoj osi aviona.
Istovremeno, prst 28, naslanjajući se na breg 27, postavlja unutrašnji okvir 12 do položaja u kojem je os vlastite rotacije žiroskopa okomita na osi vanjskog i unutrašnjeg okvira kardana. Zatim štap 33 pod dejstvom povratne opruge koja se nalazi u njemu, on se naginje u prvobitni položaj i dozvoljava šipku 31 otpustite kamere 27 I 30.
Dakle, odvodnik, nakon postavljanja okvira žiro jedinice u određeni položaj, odmah ih oslobađa. Ako se hapšenje vrši na zemlji kada je avion horizontalan, ili u horizontalnom letu, tada se sopstvena os rotacije žiroskopa postavlja u pravcu vertikalnog položaja. Zaključavanje treba izvršiti samo u horizontalnom letu, na šta posadu podsjeća natpis na dugmetu 36 "Uhvati u ravnom letu."
Ako izvršite hapšenje, na primjer tokom prevrtanja, tada će pri prelasku na nivo leta indikator položaja pokazati lažno bacanje. Istina, pod uticajem korekcije klatna, sopstvena os žiroskopa će biti postavljena u vertikalni položaj i, naravno, lažna očitavanja će nestati, ali će za to trebati dovoljno vremena da posada napravi greške u pilotiranju. Treba napomenuti da je električni krug zaključavanja dizajniran na način da kada se AGD-1 uključi pod naponom, zaključavanje se događa automatski, bez pritiska na dugme. Prilikom ponovnog hapšenja, na primjer tokom privremenog nestanka struje AGD-1, pritiskom na dugme 36 obavezno, ali samo tokom horizontalnog leta.
Na prednjoj strani indikatora nalazi se lampica upozorenja 37 (vidi sliku 4.13), koji svijetli, prvo, ako dođe do procesa zaustavljanja i, drugo, ako postoji kvar u strujnim krugovima žiromotora i DC ±27 V.
ZRAČNI HORIZONT AGB-3 (AGB-Zk)
Glavna svrha indikatora položaja AGB-3 je da posadi pruži lako uočljivu indikaciju velikih razmjera položaja aviona ili helikoptera u uglovima nagiba i nagiba u odnosu na ravninu pravog horizonta. Osim toga, indikator položaja vam omogućava da date električne signale proporcionalne uglovima nagiba i nagiba vanjskim potrošačima na avionu i helikopteru (autopilot, sistem smjera, itd.).

Indikator položaja AGB-Zk je modifikacija indikatora položaja AGB-3. Razlikuje se samo po prisutnosti ugrađenih crvenih svjetala za osvjetljavanje prednjeg dijela uređaja i bojama elemenata: indikacija.
Elektromehanički dijagram indikatora položaja AGB-3 prikazan je na sl. 4.15, električni dijagram - na Sl. 4.16, a prikaz njegove skale je na Sl. 4.17. Vlastita os žiroskopa je dovedena u vertikalni položaj pomoću sistema korekcije klatna, koji uključuje dva elektrolitička klatna 20 I 21, upravljački motori za korekciju 7 i 9. AGB-3 koristi jednokoordinatna: elektrolitička klatna, koja rade na istom principu kao i dvokoordinatna klatna, koja se koriste u AGB-2, AGI-lc i AGD-1. Klatno s jednom osovinom ima tri kontakta i reagira na nagibe u samo jednom smjeru. Postoji kontakt u krugu bočne korekcije 16 Korekcioni prekidač VK-53RB, koji prekida strujno kolo kada avion skreće, smanjujući grešku skretanja.

Vrijeme pripravnosti uređaja za rad u indikatoru položaja smanjuje se mehaničkim odvodnikom (nije prikazan na slici 4.15). Ako je letjelica u horizontalnom položaju, tada odvodnik postavlja okvire žiroskopa u početno stanje, u kojem se glavna os žiroskopa poklapa sa vertikalnom pozicijom. Odvodnik se koristi prije pokretanja uređaja, kada je iz ovih ili onih razloga potrebno brzo dovesti okvir uređaja u prvobitni položaj. Brava u AGB-3 je potisnog tipa, odnosno da bi radila potrebno je pritisnuti dugme 26 (vidi sliku 4.17) do kvara. Okviri se automatski oslobađaju od brave kada se dugme otpusti.
Rad uređaja za zaustavljanje je sličan radu odvodnika u indikatoru položaja AGD-1. Indikator položaja AGB-3 ima mehanički odvodnik.
Da bi potrošačima pružili signale za otklon aviona u kotanju i nagibu, sintetički senzor je instaliran na osi vanjskog okvira kardana. 14 (vidi Sl. 4.15, 4.16), a na osi unutrašnjeg okvira nalazi se sintetički senzor 15.
Na avionu je indikator položaja instaliran na način da je os
vanjski okvir 8
(vidi sliku 4.15) je usmjerena paralelno sa uzdužnom osom aviona. Ovo osigurava da uređaj radi u rasponu okretanja od 360°.

Os unutrašnjeg okvira kardana je u početnom trenutku paralelna sa poprečnom osom aviona. Od dodatnog
Pošto AGB-3 nema okvir za praćenje, kao AGI-lc i AGD-1, radni opseg nagiba u ovom indikatoru položaja je ograničen na uglove od ±80°. Zaista, ako ravnina ima ugao nagiba od 90°, tada će se os vanjskog okvira poravnati s osom vlastite rotacije žiroskopa. Žiroskop, izgubivši jedan stepen slobode, postaje nestabilan. Međutim, da bi se posadi pružila ispravna indikacija položaja aviona u odnosu na ravninu horizonta u obrnutom stanju (na primjer, kada se izvodi figura "Nesterovljeva petlja"), u uređaju se koriste graničnici 10 I 11 (vidi sliku 4.15). Prilikom izvođenja složenih evolucija u avionu sa uglom nagiba većim od 80°, zaustavljanje 10, koji se nalazi na vanjskom okviru, počet će pritiskati do graničnika 11, fiksiran na osu unutrašnjeg okvira. Ovo stvara moment oko ose unutrašnjeg okvira. Prema zakonu precesije, žiroskop, pod uticajem ovog momenta, precesira, odnosno rotira oko ose spoljašnjeg okvira, pokušavajući da poravna osu sopstvene rotacije sa osom primene momenta preko najkraćeg razdaljina. Dakle, vanjski kardanski okvir je ispod. Teg se rotira za 180°. Kada je ugao nagiba veći od 90°, zaustavite se 11 će se udaljiti od stajališta 10, precesija će prestati, a silueta aviona 4 će biti okrenut za 180° u odnosu na skalu visine tona 3, koji će ukazati na obrnuti položaj aviona za 180 u odnosu na horizontalnu ravan.

Indikacija položaja aviona u odnosu na ravninu horizonta u AGB-3 se vrši na sledeći način. Tokom okretanja, tijelo uređaja, zajedno sa letjelicom, rotira oko ose vanjskog okvira za ugao kotrljanja, budući da vlastita os rotacije žiroskopa održava vertikalni smjer. Silueta aviona 4 Istovremeno, učestvuje u dva pokreta: 1) prenosivi - zajedno sa telom uređaja do ugla kotrljanja at(Sl. 4.18) i 2) rotacijski (plem 6 kotrlja trib 5) nepomično u prevrtanju do istog ugla Y. Kao rezultat ova dva kretanja, silueta aviona u svemiru rotira kroz dvostruki ugao prevrtanja aviona. Posada posmatra ugao nagiba na osnovu kretanja siluete aviona 4 u odnosu na razmeru 3. U ovom slučaju, silueta se okreće prema prirodnom kutu nagiba u istom smjeru kao i avion.
Uglovi kotrljanja mogu se grubo izmjeriti pomoću skale 27 na tijelu instrumenta, a uglovi nagiba - na skali 3 i silueta aviona 4. Skala nagiba prati uglove nagiba aviona zahvaljujući sistemu za praćenje koji uključuje sinhro senzor 15, nalazi se na unutrašnjoj osi kardanskog ovjesa, prijemnik sinhronizatora 19, pojačalo 17 i motor-generator 18. U prorezu skale.3 nalazi se os na kojoj je pričvršćena silueta aviona.
Dakle, očitavanja u AGB-3 za kotrljanje i korak su prirodna i identična očitanjima AGD-1 (vidi sliku 4.11).
AGB-3 ima krug signalizacije kvara u strujnim krugovima uređaja, koji sadrži sljedeće elemente: nestanak struje motora 1 sa potvrdnim okvirom 2 (vidi slike 4.15 i 4.16) i dva releja 22 I 23. Namotaji motora 1 spojeni u seriju sa namotajima statora žiromotora 13. Kada su kola od 36 V AC u dobrom radnom stanju, struje žiromotora i sinhronih senzora teku kroz namote motora 14 I 15.
Kao rezultat, na osovini motora dolazi do okretnog momenta 1, pod uticajem kojih je polje za potvrdu 2 Signalni uređaj montiran na osovinu motora uklanja se sa vidljivog područja prednjeg dijela uređaja.
Ako nema izmjeničnog napona u strujnom krugu žiromotora ili dođe do gubitka faze, tada moment motora naglo opada i, pod utjecajem opruge, zastava se baca u vidljivo područje prednjeg dijela uređaj.
Relej 22 I 23 spojeni su paralelno na strujni krug pojačala sistema za praćenje tona. U nedostatku 27 V DC napona, kontakti 24 I 25 ovi releji se zatvaraju, manirirajući dvije faze namotaja motora 1, pa se njegov obrtni moment smanjuje, a opruga baca zastavicu 2, što signalizira nestanak struje.
Dakle, otvoreni krug u kolu napona od 36 V, frekvencije 400 Hz ili u kolu sa naponom od 27 V, kao i odsustvo jedne od ovih vrsta napajanja, može se odrediti pomoću prisustvo indikatorske zastavice u vidnom polju skale instrumenta.
AVIAHORIZONT AGK-47B
Indikator položaja je kombinovan, jer su tri instrumenta montirana u jednom kućištu: pokazivač položaja, pokazivač pravca i pokazivač klizanja.
Svrha indikatora položaja je da posadi pruži informaciju o položaju aviona u odnosu na ravninu horizonta. Pokazivač pravca se koristi za određivanje smjera u kojem se avion okreće, a indikator klizanja mjeri proklizavanje. O pokazivaču pravca se govori u odjeljku. 4.2, a indikator klizanja - u sekciji. 3.11. Pojednostavljeni kinematski, električni dijagrami i prednja strana indikatora položaja prikazani su na Sl. 4.19, 4.20, 4.21; Svi simboli na slikama su isti.

Vlastita os rotacije žiroskopa 7 (vidi slike 4.19, 4.20) se dovodi u vertikalni položaj pomoću sistema korekcije klatna, koji uključuje elektrolitičko klatno, /6 i dva solenoida 13 I 14, Solenoid 13 smješten okomito na vanjsku osu at kardanski ovjes i solenoid 14 - okomito na unutrašnju osu X kardanski ovjes na unutrašnjem okviru 6, izrađen u obliku kućišta. Svaki od solenoida ima dva namotaja, koji stvaraju magnetna polja u suprotnom smjeru kada struje prolaze kroz njih. Solenoidi imaju metalna jezgra koja se mogu pomicati unutar solenoida. Ako se vlastita os rotacije žiroskopa poklapa sa smjerom lokalne vertikale, tada se isti signali primaju od elektrolitičkog klatna do solenoidnih namotaja i jezgre, koje su u srednjem položaju, ne stvaraju momente oko osi kardana. Kada glavna os žiroskopa odstupi od vertikalnog smjera, struje koje teku kroz namotaje solenoida neće biti jednake zbog nejednakih otpora između kontakata elektrolitskog klatna. To će dovesti do pomicanja jezgri u solenoidima, a zbog njihove težine oko osi kardana, nastat će momenti koji će osovinu vlastite rotacije žiroskopa vratiti u vertikalni položaj. Dakle solenoid 14 učestvuje u stvaranju obrtnog momenta oko unutrašnje ose kardana i solenoida 13 - oko vanjske ose ovjesa.

Vanjska os kardana indikatora položaja paralelna je s poprečnom osom aviona, tako da je nagib prikazan na kružnoj skali 4, povezana s vanjskim okvirom kardana 5, i linija horizonta povezana s tijelom uređaja. Prilikom ronjenja ili podizanja, linija horizonta se pomiče u odnosu na fiksnu skalu - pilot vidi suprotnu sliku: siluetu aviona 1 zajedno sa skalom 4 pada ili raste u odnosu na liniju horizonta. Indikacija kotrljanja se vrši relativnim položajem siluete aviona / povezane sa unutrašnjim okvirom kardana i skale 3, montiran na vanjski kardanski okvir. Da bi indikacija kotrljanja bila prirodna, odnosno silueta aviona simulira prevrtanje u odnosu na ravninu horizonta, baš kao i kod AGB-3, AGK.-47B koristi par zupčanika sa omjerom prijenosa od 1:1. Skala nagiba je označena u intervalima od 20°, a skala nagiba je označena u intervalima od 15°. Indikacija kotrljanja i nagiba AGK-47B tokom evolucije aviona prikazana je na Sl. 4.11.

Indikator položaja ima mehaničku bravu fiksnog tipa, odnosno ako kod AGB-3 i AGD-1 brava radi samo kada se pritisne dugme, onda je kod AGK-47B moguće produžavanjem šipke za zaključavanje 20 (Sl. 4.21) prema sebi, fiksirajte ga u ovom položaju. Kada je uređaj zaključan, na prednjoj strani uređaja pojavljuje se crvena zastavica sa natpisom „Zaključano“. Kada je uređaj zaključan, os vlastite rotacije žiroskopa poklapa se s vertikalnom osom zrakoplova, a osi at i x se poklapaju sa uzdužnom i poprečnom osom aviona. Na ručici za upravljanje bravom piše “Povucite bravu”.
Koristeći čegrtaljku 22 Moguće je, u određenim granicama, promijeniti položaj linije umjetnog horizonta u odnosu na tijelo instrumenta, što je ponekad preporučljivo učiniti radi praktičnosti održavanja putanje leta tokom dugog nehorizontalnog leta.
Kao i svaki indikator položaja, AGK-47B je podložan grešci skretanja, ali zbog činjenice da je namijenjen za ugradnju na lakomotorne avione, gdje možda nema prekidača za korekciju, korekcija se u njemu ne može isključiti . Istovremeno, da bi se smanjile greške pri skretanju ulijevo, uređaj je dizajniran tako da je normalan položaj ose vlastite rotacije njegov nagnuti položaj naprijed, duž leta, za 2°. Smanjenje greške posebno za lijevo skretanje vjerovatno se može objasniti činjenicom da avioni češće skreću lijevo, jer pilot sjedi u kokpitu na lijevom sjedištu. Zaista, tokom lijevog skretanja, elektrolitičko klatno će pokazati prividnu vertikalu, koja odstupa u zaokret pod kutom
gdje je ω ugaona brzina skretanja; V- brzina leta aviona; g- ubrzanje gravitacije.
Pod uticajem sistema bočne korekcije pomoću solenoida 13 žiroskop će početi da se kreće brzinom prema prividnoj vertikali

U isto vrijeme, prilikom okretanja, kraj vlastite ose rotacije žiroskopa će se rotirati oko položaja prave vertikale brzinom
![]() (4.5)
(4.5)
gde je α 0 početni ugao nagiba ose sopstvene rotacije žiroskopa napred (slika 4.22), usmeren u suprotnom smeru, budući da žiroskop teži da zadrži položaj ose sopstvene rotacije u prostoru nepromenjenim . Smjer brzine ω γ je suprotan smjeru brzine precesije žiroskopa β.

Očigledno, da ne bi bilo greške prilikom skretanja ulijevo, uslov mora biti ispunjen
ili za male uglove može se napisati β 0 (4.6).
![]() (4.7)
(4.7)
![]() (4.8)
(4.8)
Znajući K y indikator položaja i najčešće brzine pri kojima dolazi do skretanja, možete odrediti potrebni ugao α 0 nagiba ose žiroskopa.
AIR HORIZONT AGR-144
AGR-144 indikator položaja je kombinovani instrument; Sadrži tri instrumenta: pokazivač položaja, pokazivač pravca i pokazivač klizanja.
Svrha indikatora položaja je da posadi pruži informaciju o položaju aviona u odnosu na ravninu horizonta.Indikator pravca se koristi za određivanje prisutnosti i smjera okretanja aviona oko njegove vertikalne ose. Indikator klizanja mjeri proklizavanje aviona. Osim toga, kada se koordinira
Jedna od glavnih osobina koje određuju sposobnost plovila za plovidbu je njegova stabilnost. Dobra stabilnost jahte je, prije svega, garancija u uvjetima jakog mora. Područje instalirano na plovilu također ovisi o stabilnosti, što u velikoj mjeri određuje njegove brzine. Sam izraz „stabilnost“ označava sposobnost broda da se odupre prevrtanju. U ovom članku ćemo se detaljnije zadržati na ovom fenomenu - brodska rola.
Uzroci prevrtanja broda
U pomorskoj disciplini definira se kao odstupanje dijametralne ravnine trupa od vertikale, konvencionalno povučene na površinu vode. Jednostavnije i razumljivije rečeno, kotrljanje je svako odstupanje konvencionalne ravnine trupa od horizontalnog položaja. Za to može postojati nekoliko razloga:
- Utjecaj valova na trup broda, kada se pod udarima nadolazećih valova brod počinje ljuljati i naginjati na bok.
- Utjecaj vjetra na jedra jahte. Oštri udari jakog vjetra mogu dovesti do formiranja prilično velike liste, često uzrokujući prevrtanje jedrilice.
- Nepravilno postavljanje tereta u prtljažnik broda ili njegovo skidanje sa spojnica tokom ljuljanja.
- Djelovanje centrifugalnih sila kada jahta uđe u oštar zavoj.
Ugao nagiba plovila mjereno u stupnjevima, što ukazuje na stupanj odstupanja horizontalnog položaja njegovog trupa od konvencionalnog horizonta morske površine. Osim toga, nagib broda može se odrediti po razlici gaza između desnog i lijevog boka. Ako je gaz na lijevoj strani veći, tada se ova pozicija trupa naziva " roll to port" Kada je gaz plovila više prema desnoj strani, situacija se definira kao "lista na desnu stranu".
Vrste brodskih rola
U zavisnosti od uzroka , može biti nekoliko vrsta. To uključuje sljedeće vrste.
Dynamic
Najčešći od svih vrsta rolanja s kojima se svaki jedriličar mora suočiti prilikom izlaska na otvoreno more. Nastaje pod uticajem određenih spoljnih kratkoročnih sila. Obično su takve sile oštri udari vjetra ili valovi koji udaraju u stranu. Dinamičko prevrtanje, zbog kratkog trenutka nastanka, rijetko zahtijeva intervenciju jahtaša. Da budemo precizniji, posada najčešće jednostavno nema vremena za poduzimanje bilo kakvih konkretnih radnji kako bi eliminirala nastalo dinamično prevrtanje.
Kao rezultat toga, brod se ili samonivelira, zahvaljujući rezervi stabilnosti ugrađenoj u njegov dizajn, ili leži na boku. Sposobnost broda da se odupre kratkotrajnom dinamičkom prevrtanju određuje njegove karakteristike stabilnosti. Kad god yacht roll pod uticajem spoljne sile, odmah nastaju suprotno usmerene izjednačujuće sile koje teže da dovedu brod u prvobitni položaj.
Statički
Zove se statički , koji je nastao pod uticajem neke statičke, odnosno konstantne po veličini sile. Uzrok statičkog kotrljanja je pomak težišta plovila prema krmi/pramcu ili na jednu od strana. To je obično uzrokovano nepravilnim poravnanjem tereta ili njegovim pomakom kao rezultatom slomljenih učvršćenja. Osim toga, razlog za statičnu listu plovila može biti ulazak vode u trup kao rezultat rupe. U ovoj situaciji, brod je u nagnutom položaju čak iu odsustvu vanjskog utjecaja u obliku valova ili vjetra. Statičko kotrljanje se definiše kao negativna početna stabilnost plovila, koja uz dodatni utjecaj vanjskih sila, s velikim stepenom vjerovatnoće može dovesti do njegovog prevrtanja.

Uzdužni
Uzdužna rolna, ili trim, broda je neravnoteža gaza njegove krme i pramca. Kada je gaz krme veći od gaza pramca, ovo je trim na krmi; ako je, naprotiv, onda je trim na pramcu. Uzdužno kotrljanje plovila ima značajan uticaj na sposobnost plovidbe jahte. Za male jahte, čija je dužina trupa manja od 10 m, smatra se da je maksimalni dopušteni trim razlika u gazu od 5 cm. Veći gaz krme smanjuje brzinu čamca, jer prekomjerno potopljena krma povećava otpornu silu vodene mase do kretanja.
Uzdužno kotrljanje povećava stabilnost smjera plovila u pokretu. S tim u vezi, jahta slabije sluša kormilo kada je potrebno promijeniti kurs. Osim toga, trim na krmi uzrokuje da čamac pada na vjetar. Za čamce čiji je glavni tip kretanja rendisanje, krmeni trim otežava im postizanje stabilne klizne staze. Takozvani efekat "delfiniranja" se opaža kada se pramac plovila povremeno zabacuje uvis, a zatim zaroni.
Uzdužni podrezivanje na pramcu također dovodi do značajnog smanjenja brzine zbog "zakopavanja" pramca u valove, što povećava otpor pri kretanju. Jahta uređena na pramcu postaje zakrivljena, previše "reaguje" na najmanju promjenu položaja kormila i lošije drži kurs. Ovo je posebno očigledno kada se krećete pod uglom u odnosu na talas. Povećanje otpora vode na čamcima za rendisanje također uzrokuje probleme s postizanjem kliznog puta zbog smanjenja brzine. Svi ovi problemi se mogu izbjeći pravilnim postavljanjem tereta ili balasta unutar trupa.
Cirkulira
Cirkulirajući roll je kotrljanje koje se događa kada brod uđe u skretanje. Veličina cirkulacijskog valjka ovisi o brzini kojom brod manevrira i radijusu zakrivljenosti zavoja. Deplasmanski brodovi se kotrljaju prema van kada uđu u skretanje. Čamci za rendisanje, zbog dinamičkih karakteristika njihovog kretanja, naginju se, naprotiv, unutar radijusa okretanja.
Previše oštro pomicanje kormila na plovilima niske stabilnosti može dovesti do prevrtanja plovila. Osim toga, putnici i članovi posade koji nisu spremni za manevar mogu se naći nasukani zbog iznenadne liste. Stoga, prije ulaska u skretanje, kormilar treba predvidjeti opasnost od prevrtanja jahte, te upozoriti ljude na brodu na predstojeći manevar.
Sprečavanje prevrtanja broda
Kao što vidite, nagib je prilično neugodan fenomen koji može dovesti do prilično ozbiljnih posljedica - ljudi padaju preko palube ili čak prevrću brod. Usput, puč je moguć ne samo na brodu. U pomorskoj istoriji bilo je slučajeva prevrtanja brodova punom brzinom kroz pramac - tako je navodno stradao poznati kliper Ariel, pobjednik Trke čaja 1866. godine.
Za sprečavanje i borbu protiv nagiba, na velikim brodovima se ugrađuju čitavi sistemi niveliranja. Uključuju rezervoare za vodu, pumpe i cilindre sa komprimovanim vazduhom, kingstone i tako dalje. Takvi "anti-roll" sistemi dio su cjelokupnog brodskog sistema borbe protiv preživljavanja i omogućavaju izravnavanje rezultirajućih kotrljanja i trimova.

Ugao kotrljanja određuje poseban uređaj - inklinometar. Instalira se na mostu broda ili u pilotskoj kućici jahte. Obično postoje dvije vrste:
- Visak fiksiran na sektor sa podjelama stupnjeva.
- Tečnost zasnovana na kretanju vazdušnog mehurića unutar tečnosti.
Otpor na kotrljanje, povećanje njegovih kritičnih očitanja, glavni je zadatak brodskih dizajnera. Danas mnoge proizvodne jahte, između ostalih tehničkih zahtjeva, podliježu standardima stabilnosti. Za jahte za krstarenje ova brojka je oko 110-115 o. Ako posjedujete jahtu, ali ne znate njenu sposobnost da se odupre prevrtanju, onda se preporučuje da izvršite eksperimentalni test nagiba. Čamac, koji se nalazi blizu obale, je umjetno nagnut dok ne padne na bok. Tako se dobijaju podaci o sposobnosti jahte da se odupre kotrljanju različitih veličina.